|
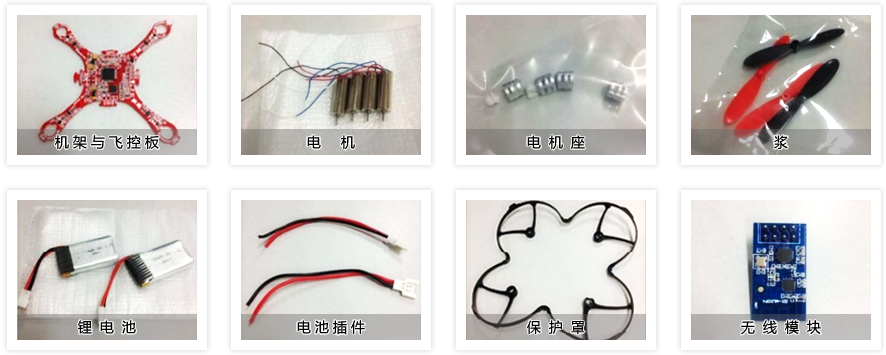
电机的种类:分为有刷和无刷两类。有刷主要有空心杯和碳刷型的直流电机,主要是可以体积做到非常小,价格相对来说便宜。无刷的应用一般为稍大型的飞行器,载重大,可以有更广范的用途。无刷电机的型号说明,例如:2218 KV2000, 22代表电机的外转子直径22mm,18代表转子的高度为18mm, KV2000,代表电机的转速,代表电压每增加1V电机的实际转速增加2000rpm/min。
电 调:驱动电机用的调速器,无刷驱动相对来说要复杂需要单独的控制MCU,控制三相桥驱动,有刷的一般为一个功率器件去驱动,都是通过调节PWM信号的脉冲宽度来控制各个电机的转速。多大功率的电机要选合适的电调来驱动。
正反桨:桨的选用和电机的参数相关。多大的电机选多大的桨。不可以小马拉大车。
电 池:四旋翼使用重量轻,容量大的电源,动力型锂电池是首选,参数主要包括标称电压,容量和瞬间放电能力,例如:2S/1500maH 25C,表明电压为2*3.7=7.4V 容量1500maH 瞬间放电能力为25*1500ma = 37.5A。
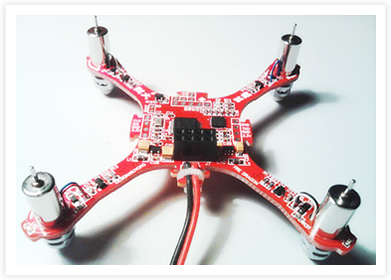
机 架:主要就是固定电机相关的地方,外形可以多种多样。一般都用超轻,结实,薄的材料加工而成。
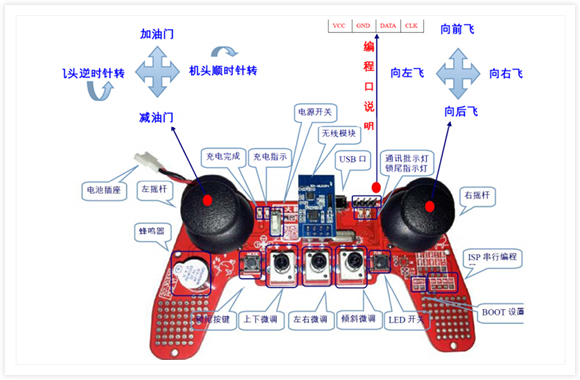
遥控器:主要为发送各种控制命令。现用的频段为2.4G,正常的四旋翼至少为四通道,通道数越多,说明可以控制的功能也就越多。成品商用的遥控器,可控范围一般是几百米至上千米。价格也不一致,常用的至少几百,好一点的上千一台了。
飞 控:为四旋翼的核心部件,没有飞控,组装好的四旋翼相当于无头、无翅膀的苍蝇,想飞都飞不起来。飞控主要组成,微处理器,陀螺仪,加速度传感器,地磁传感器,气压计,空速计,GPS,无线接收模块组成。微处理器通过从各路传感器获取实时的数据,经过捷联惯导算法,求出姿态角,再根据无线接收机收到的遥控命令数据进行比较计算出控制量然后分别对这些 据无线接收机收到的遥控命令数据进行比较,计算出控制量,然后分别对这些控制量进行PID计算,最后将这些输出量转化为PWM 信号,分别控制各个电机转速达到想要的姿态和位置 机转速,达到想要的姿态和位置。
|