
引言
本文档描述如何在安全相关系统的背景下使用
STM32G0 Series 微控制器,并指定了为达到目标安全完整性等级,用户需承担的
安装和操作责任。
本手册适用于 STM32G0 Series 微控制器和 X-CUBE-STL 产品编号。
如果遵循本手册的指示,则系统设计者无需了解 STM32G0 Series 功能安全标准应用的详情。
本手册按照 IEC 61508 标准编写。它描述了如何在其他功能安全标准(例如,安全机器指示 ISO 13849)的背景下使用
STM32G0 Series 微控制器。
本手册中收集的安全分析考虑了基于 Arm
®
Cortex
®
-M0+的 STM32G0 Series 微控制器的不同产品编号中存储器大小、内部外设
编号和封装的变化。
本手册必须与相关产品编号的技术文档(例如参考手册和数据手册)阅读,这些技术文档可以在 www.st.com 上获取。
STM32G0 系列安全手册
UM2455
UM2455 - Rev 1 - July 2021
更多垂询,请联系您本地的意法半导体销售处
www.st.com

1 关于本文档
1.1 目的和范围
本文档描述如何在安全相关系统的背景下使用基于 Arm
®
Cortex
®
-M0+的 STM32G0 Series,并指定了为达到所需
安全完整性等级,用户需承担的安装和操作责任。
对于内置一个或多个 STM32G0 Series 微控制器的解决方案,系统设计者可使用本文档评估该解决方案的安全性。
提示
Arm
是
Arm Limited
(或其子公司)在美国和
/
或其他地区的注册商标。
1.2 术语和缩略语
STM32G0 Series 硬件模块的相关缩略语(例如,DMA 或 GPIO)与 STM32G0 Series 技术文档中使用的相同。参
见下表获取本文档中所用缩略语的列表。
表 1. 术语和缩略语
缩略语 定义
CCF 共因故障
CM 连续模式
COTS 商用现成品
CoU 使用条件
CPU 中央处理器
CRC 循环冗余校验
DC 诊断覆盖率
DMA 直接存储器访问
DTI 诊断测试间隔
ECM 发动机控制模块
ECU 电子控制单元
EUC 受控设备
FIT 故障率
FMEA 故障模式影响分析
FMEDA 故障模式影响诊断分析
HD 高需求
HFT 硬件容错
HW 硬件
ITRS 国际半导体技术发展路线图
LD 低需求
MCU 微控制器单元
MTBF 平均故障间隔时间
MTTFd 系统平均无危险故障时间
NA 不可用
PDS(SR) 功率驱动系统(安全相关)
PEc 可编程电子设备 - 核心
UM2455
关于本文档
UM2455 - Rev 1
page 2/108
缩略语 定义
PEd 可编程电子设备 - 诊断
PFD 按需情况下发生危险故障的概率
PFH 每小时故障概率
PL 性能等级
PST 过程安全时间
SFF 安全失效分数
SIL 安全完整性等级
SRCF 安全相关控制功能
SRECS 安全相关电气控制系统
SRP/CS 控制系统的安全相关部件
SW 软件
另请阅读本手册中使用的以下定义:
• 终端用户:STM32G0 Series 的最终用户,负责将 MCU 集成到实际应用(例如,电子控制板)中。
• 应用软件:在 STM32G0 SeriesMCU 上运行并实现安全功能的实际软件。
UM2455
术语和缩略语
UM2455 - Rev 1
page 3/108

1.3 参考标准
本文档按照适用于电气、电子和可编程电子安全相关系统的功能安全的 IEC 61508 国际标准编写。
所参考的版本为 IEC 61508:1-7 © IEC:2010。
本手册中考虑的其他功能安全标准如下:
• ISO 26262-1, 2, 3, 4, 5, 6, 7, 8, 9: 2011(E), ISO 26262-10: 2012(E)
• ISO 13849-1:2006, ISO 13849-2:2010
• IEC 62061:2012-11,版本 1.1
• IEC 61800-5-2:2007,版本 1.0
下表列出了本文档内容与 IEC 61508-2 附录 D 中所列要求的对应关系。
表 2. 本文档内容与 IEC 61508-2 附录 D 要求之间的对应关系
IEC 61508 要求(第 2 部分附录 D) 参考
D2.1 a) 能够执行的功能的功能说明 第 3 节
D2.1 b) 合规项硬件和/或软件配置的识别 第 3.2 节
D2.1 c) 合规项的使用限制或项目行为或故障率分析所基于的假设 第 3.2 节
D2.2 a) 随机硬件故障导致的合规项故障模式,造成功能故障且不会被合规项内部诊断检测到;
使用条件
D2.2 b) a)中所述每一种故障模式的估计故障率;
D2.2 c) 随机硬件故障导致的合规项故障模式,造成功能故障并被合规项内部诊断检测到;
D2.2 d) 随机硬件故障导致的合规项内部诊断故障模式,造成检测功能故障的诊断失败;
D2.2 e) c)和 d)中所述每一种故障模式的估计故障率;
D2.2 f) 合规项内部诊断检测到的 c)中的每一种故障模式的诊断测试间隔; 第 3.2.2 节
D2.2 g) c)中每一种故障模式的内部诊断指示的合规项输出; 第 3.6 节
D2.2 h) 任何定期的验证测试和/或维护要求;
使用条件
D2.2 i) 就指定功能而言,对于能够被内部诊断检测到的这些故障模式,必须提供充足的信息以便开发外部诊断能
力。
D2.2 j) 硬件容错;
第 3 节
D2.2 k) 提供功能的合规项该部分的 A 型或 B 型分类(参见 7.4.4.1.2 和 7.4.4.1.3);
本手册中报告的安全故障分数是在本文档所述假设下并特别根据使用条件中所述使用条件计算得出。
UM2455
参考标准
UM2455 - Rev 1
page 4/108

2 STM32G0 Series 微控制器开发过程
2.1
对于严格要求安全性的应用所使用的微电子器件,它们的开发过程考虑了适当的管理,以降低设计阶段引入系统故
障的可能性。
IEC 61508:2 附录
F
(
ASIC
技术和措施
- 避免系统故障)
作为按照 IEC 61508 的要求定制微控制器标准设计和制造
商过程的指导原则。附录 F 中报告的核查表有助于收集给定实际过程的所有相关证据。
STMicroelectronics 标准开发过程
STMicroelectronics(ST)服务于四个工业领域:
• 标准产品。
• 汽车产品:ST 汽车产品符合 AEC-Q100 标准。它们将接受特定的压力测试和处理指令,以达到要求的质量
级别和产品稳定性。
• 汽车安全:汽车领域的一个子集。ST 以 ISO 26262 道路车辆功能安全标准为参考。ST 支持客户查询产品故
障率和 FMEDA,为使硬件系统符合既定安全目标提供支持。ST 提供可安全应用于预定用途的产品,与客户
一起分析任务资料,采用常用方法并为残余风险制定对策。
• 医用品:ST 遵守适用的医用品规范,并在产品的开发中严格执行这一标准。
STMicroelectronics 产品开发过程符合 ISO/TS 16949 标准,且这一标准专用于将客户说明和市场或工业领域要求
转化为半导体器件及其所有相关元件(封装、模块、子系统、应用、硬件、软件和文档)的相关活动,符合ST
内部程序并能使用 ST 内部或分包技术进行制造。
图 1 xxx 是对意法半导体产品开发过程的总结。
UM2455
STM32G0 Series 微控制器开发过程
UM2455 - Rev 1
page 5/108

图 1. STMicroelectronics 产品开发过程
3 认证
1 概念 2 设计与验证
• 与设备将来使用有关的关键特征
与要求
• 行业领域、特定客户要求与控制
定义及合规所需的测试
• 产品目标规范与策略
• 驱动产品开发的项目经理任命
• 评估要使用的技术、设计工具和
IP
• 设计目标规范和产品验证策略
• 质量技 术设 计( DFD、DFT、
DFR、DFM……)定义
• 用于确保软件和硬件系统解决方
案满足目标规范要求的架构和定
位
• 产品批准策略和项目计划
• 半导体设计开发
• 硬件与应用开发
• 软件开发
• 用于预测可靠性表现的新产品规
格分析
• 使用Arrhenius的法则和其他适用
模型的可靠性计划、可靠性设计
规则、操作寿命测试失效率预测
• 使用工具和APQP、DFM、DFT、
DFMEA、FMKM等方法
• 检测潜在的可靠性问题和用于克
服这些问题的解决方案
• 评估工程样本(ES),以确定主
要的潜在故障机制
• 用于快速参数降级早期预警的电
气参数漂移统计分析(如保持力
测试)
• 对故障部件进行故障分析,以澄
清故障模式和机制并确定根源
• 根据需要,在可靠性测试后对良
好部件进行物理破坏性分析
• 静电放电(ESD)和锁定敏感度
测量
• 成功完成产品认证计划
• 通过使用压力方法来检测潜在薄
弱部分,保证先进技术中的产品
交付
• 成功完成电气特性描述
• 对新产品的性能进行总体评估,
以保证客户制造过程和最终应用
的可靠性(任务概述)
• 产品测试、控制和监控的最后处
置
UM2455
STMicroelectronics 标准开发过程
UM2455 - Rev 1
page 6/108

3 参考安全架构
本节提供 STM32G0 Series 安全架构的详细描述。
3.1 安全架构简介
本文档中分析的 STM32G0 Series 微控制器可用作不同安全应用中的合规项。
本节的目的是识别此类合规项,从而根据参考概念定义的相关假设定义分析背景。因此,此概念定义还包含参考安
全要求作为已定义合规项之外的设计的假设。
因此,合规项方法的目的不是提供微控制器所属系统的详尽危险和风险分析,而是列出分析期间考虑的系统相关信
息。此类信息包括危险因素的应用相关假设、故障频率和应用已保证的诊断覆盖率等。
3.2 合规项
本节包含与合规项的定义相关的所有信息,包括其在不同安全架构模式中的使用。
3.2.1 合规项的定义
根据 IEC 61508:1 第 8.2.12 款,合规项是按照 IEC 61508 系列条款声明的任何项目(例如元件)。在其开发结束
时,其用户必须通过安全手册对其进行描述。
在本文档中,合规项被定义为包含一个或两个 STM32 微控制器(MCU)的系统(参见图 2)。通信总线直接或间
接连接到传感器和执行器。
UM2455
参考安全架构
UM2455 - Rev 1
page 7/108
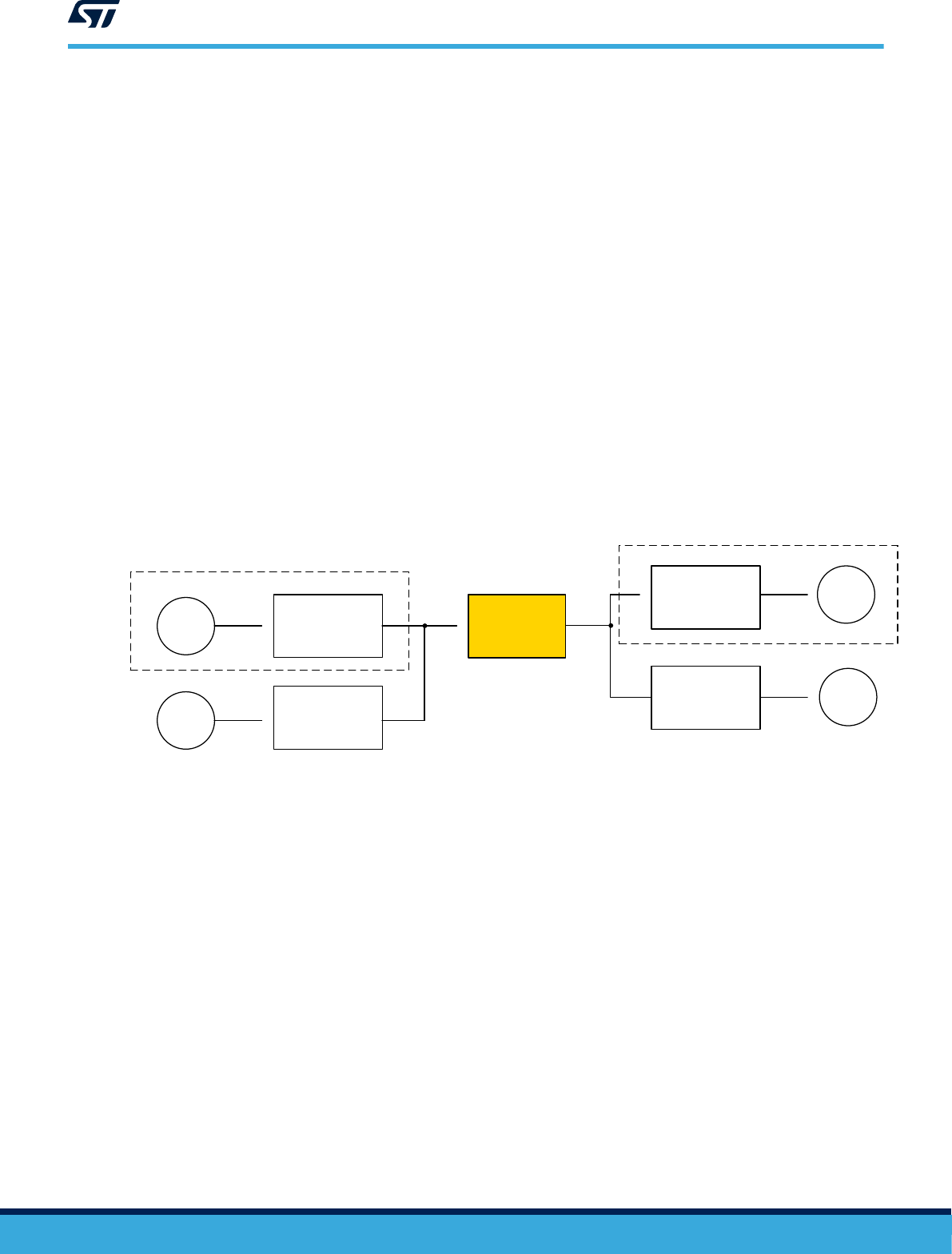
图 2. 合规项的定义
传感器
执行器
S
S
A
A
处理元件
合规项
远程
控制器
远程
控制器
远程
控制器
远程
控制器
STM
MCU
UM2455
合规项
UM2455 - Rev 1
page 8/108

为保证 STM32G0 Series 的功能(外部存储器、时钟石英等)或其安全性(例如,外部看门狗、电压监控器),需
要其他可能与合规项有关的元件(例如,外部硬件元件)。
定义的合规项可按照 IEC61508-4 第 3.4.5 款分类为“元件”。
3.2.2 合规项执行的安全功能
本质上,合规项架构可以描述为由执行安全功能或部分安全功能的以下过程组成:
• 输入处理元件(PEi)从连接到传感器的远程控制器读取安全相关数据,并将其传输至以下计算元件;
• 计算处理元件(PEc)执行安全功能所需的算法,并将结果传输至以下输出元件;
• 输出处理元件(PEo)将安全相关数据传输至连接到执行器的远程控制器;
• 对于 1oo2 架构,可能还存在投票处理元件(PEv);
• 为了保证安全完整性,考虑合规项外部处理,例如看门狗(WDTe)和电压监控器(VMONe)。
在详述 CoU(安全机制的定义)的章节中阐明了 PEv 以及外部处理 WDTe 和 VMONe 的角色:
• WDTe:参见“独立看门狗”– VSUP_SM_2 和“应用软件中的控制流监控”– CPU_SM_1,
• VMONe:参见“电源电压监控”– VSUP_SM_1。
总之,STM32G0 Series 微控制器为实现包含以下三项操作的终端用户安全功能提供支持:
• 从输入外设安全采集安全相关数据。
• 应用软件程序的安全执行和相关数据的安全计算。
• 结果或决策到输出外设的安全传输。
使用这三种基础操作完成合规项声明与安全指标计算。
根据上文报告的已实现安全功能的定义,可将该合规项(即元件)视为 B 类(根据 IEC61508-2 第 7.4.4.1.2 款的
定义)。尽管对 STM32G0 Series 执行了精确、彻底且详细的故障分析,还必须考虑该器件的内在复杂性,因此分
类为 B 类是合适的。
因此,确定了两种主要的安全架构:1oo1(使用一个 MCU)和 1oo2(使用两个 MCU)。
3.2.3 参考安全架构 - 1oo1
在 1oo1 参考架构(如下文图 3 所示)中,通过 STM32G0 Series 内部处理(已实现安全机制)和外部处理 WDTe
与 VMONe 的组合来保证合规项的安全完整性。
1oo1 参考架构的目标是 SIL2。
UM2455
合规项
UM2455 - Rev 1
page 9/108
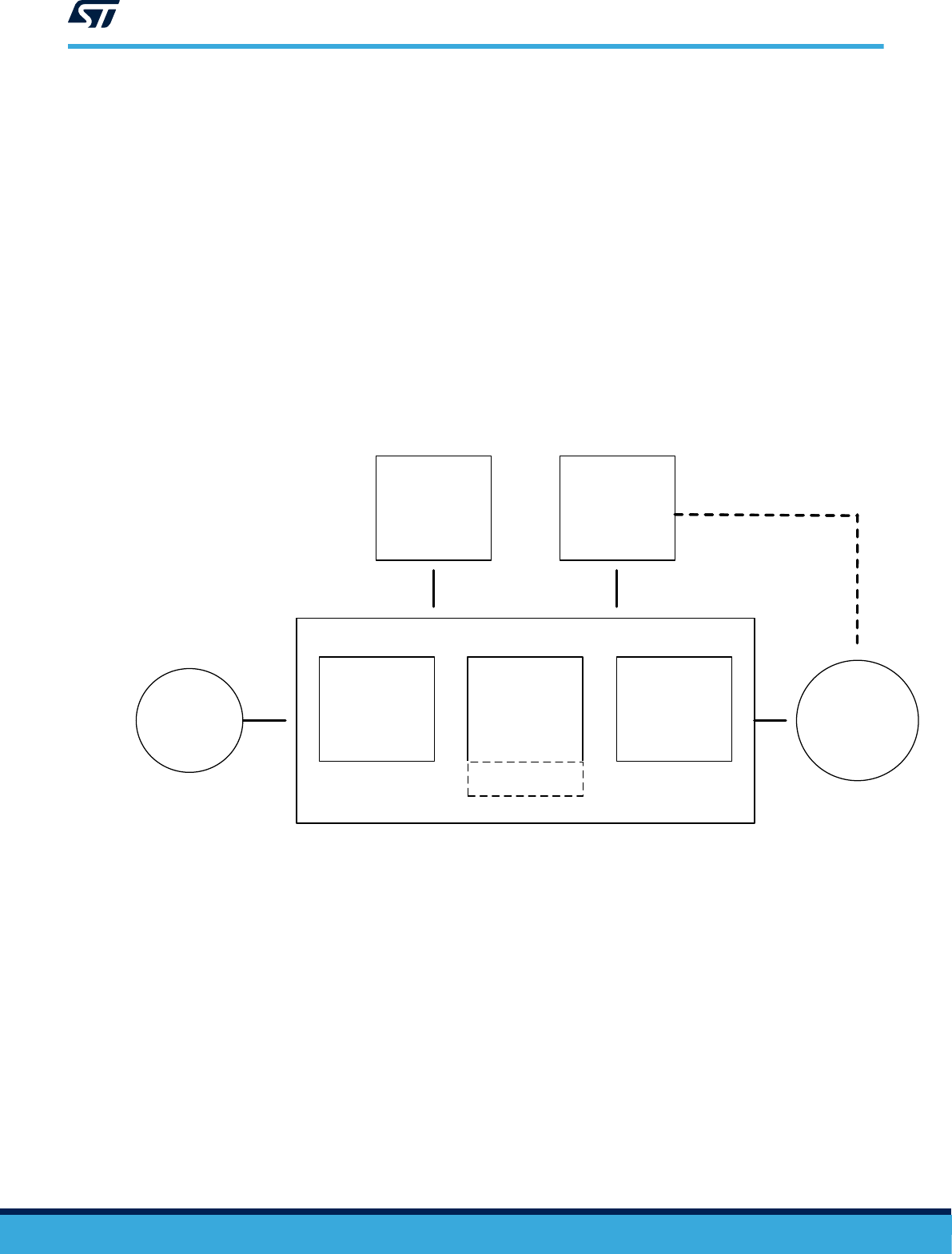
图 3. 1oo1 参考架构
PEc
执行器
WDTe
传感器
VMONe
PEoPEi
PEd
UM2455
合规项
UM2455 - Rev 1
page 10/108

3.2.4 参考安全架构 - 1oo2
1oo2 参考架构(如下文图 4 所示)包含两个独立通道,二者均以与 1oo1 参考架构相同的方式来实现。通过
STM32G0 Series 内部处理(已实现安全机制)和外部处理 WDTe 与 VMONe 的组合来保证每个通道的安全完整
性。通过允许声明 HFT=1 的外部表决器 PEv 保证整个合规项的安全完整性。因此,可以达到 IEC61508-2 表 3 中
规定的更高安全完整性等级。应在两个通道间实现适当隔离(包括电源隔离),以避免共因故障的巨大影响(参见
第 4.2 节 从属故障分析)。无论如何,都需要进行 βD 计算。
1oo2 参考架构的目标是 SIL3。
UM2455
合规项
UM2455 - Rev 1
page 11/108
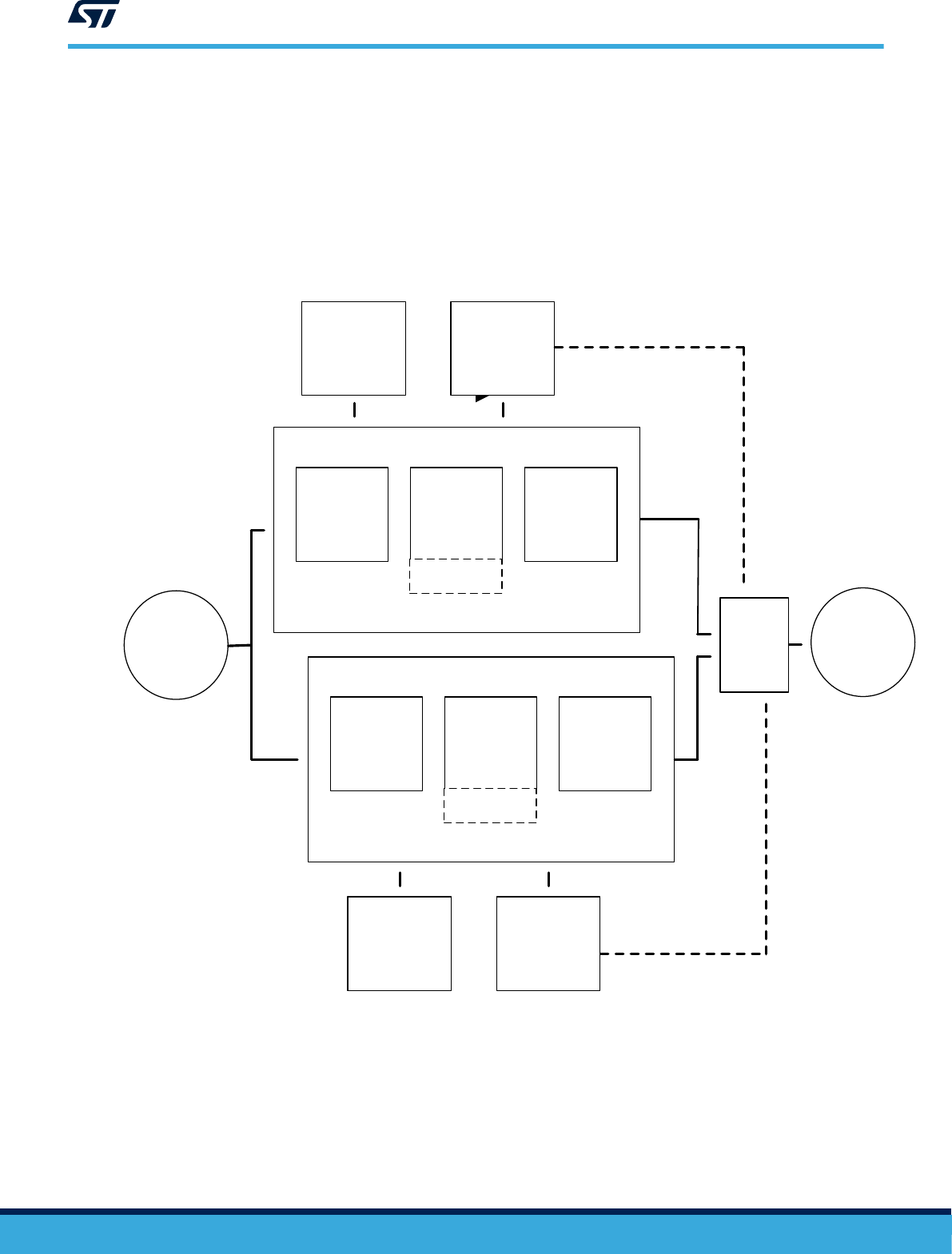
图 4. 1oo2 参考架构
MSv46031V1
执行器
传感器
VMONe
PEc
PEoPEi
PEd
WDTeVMONe
PEv
PEc
PEoPEi
PEd
WDTe
UM2455
合规项
UM2455 - Rev 1
page 12/108

3.3 假定要求
本节总结了 STM32G0 Series 微控制器安全分析期间作出的所有假设。
3.3.1 假定安全要求
概念说明、危险和风险分析、整体安全要求说明和结果分配决定了下列合规项要求(ASR:假定安全要求)。
Caution: 最终用户负责检查最终应用是否符合这些假设。
ASR1:根据第 4 部分第 3.5.16 款,合规项可用于四种类型的安全功能操作模式:
• 连续模式或高需求 SIL3 安全功能(CM3),或者
• 低需求 SIL3 安全功能(LD3),或者
• 连续模式或高需求 SIL2 安全功能(CM2),或者
• 低需求 SIL2 安全功能(LD2)。
ASR2:合规项用于实现允许 10 ms(最坏情况)时间预算的安全功能,以便 STM32 MCU 检测和响应故障。在系
统层面的错误响应链中,这段时间相当于分配给 STM32G0 Series MCU 的过程安全时间(下图所示“STM32xx 系
列责任”)。
UM2455
假定要求
UM2455 - Rev 1
page 13/108

图 5. STM32 PST 的分配和目标
系统级PST
执行器反应
STM32xx的职责 最终用户的职责
….
MCU检测 FW反应 SW反应
UM2455
假定要求
UM2455 - Rev 1
page 14/108

ASR3:合规项用在可连续通电超过 8 小时的安全功能中。假设不需要任何验证测试且产品的生命周期被认为不小
于 10 年。
ASR4:假定只执行一项安全功能,或者如果很多,则将所有功能划分为相同 SIL,从而使它们在安全要求方面不可
区分。
ASR5:如果有多重安全功能实现,则假定终端用户负责保证其需要的相互独立性。
ASR6:假设应用软件中没有已实现并与安全功能共存的“非安全相关”功能。
ASR7:假设已实现的安全功能不依赖于 STM32G0 Series MCU 至/从低功耗状态的过渡。
ASR8:合规项的局部安全状态是指以下任何一种状态:
•
SS1:通知应用软件存在故障且可通过应用软件本身响应
•
SS2:无法通知应用软件存在故障或应用软件无法执行响应
(1)
1.
终端用户必须考虑到,影响
STM32
的随机硬件故障可能危害
MCU
正常工作的能力(例如,影响程序计数器的故障模式会妨
碍软件的正确执行)。
下表提供了安全状态 SS1 和 SS2 的详细信息:
表 3. SS1 和 SS2 安全状态详细信息
安全状
态
条件 合规项操作
系统过渡到安全状态 – 1oo1 架
构
系统过渡到安全状态 – 1oo2 架
构
SS1
通知应用软件存在故障且可通
过应用软件本身响应。
向应用软件报告
故障
SS2
无法通知应用软件存在故障或
应用软件无法执行响应。
WDTe 发出复位
信号
WDTe使整个应用系统处于
其安全状态(安全关闭)
(1)
PEv使整个应用系统处于
其安全状态
提示
3.4
1.
这里的安全状态达成符合
IEC61508-2
第
7.4.8.1
款的相关注释。
ASR9:假定终端用户在系统层面定义的安全状态与合规项的假定局部安全状态(SS1、SS2)兼容。
ASR10:假定按照 IEC 61508-2 的方法 1H 和 1S 分析合规项。
请参见第
3.5
节
系统安全完整性和第
3.6
节
硬件和软件诊断说明。
ASR11:假设按照 IEC61508:2 第 7.4.4.1.2 款将合规项视为 B 类。
电气规范和环境限制
为保证 STM32G0 Series 的安全完整性,用户不得超出 STM32G0 Series 用户手册中报告的下列电气规范和环境
限制:
• 绝对最大额定值,
• 容量,
• 工作条件。
3.5
3.6
由于存在大量 STM32G0 Series 产品型号,本文档中没有列出相关用户手册和数据手册;用户有责任仔细检查相关
产品编号的技术文档(参见)中的上述限制。
系统安全完整性
根据 IEC 61508-2 第 7.4.2.2 款的要求,STM32G0 Series 的开发过程中考虑了方法 1S。根据 IEC61508-2 第
7.4.6.1 款的明确认可,可将 STM32 MCU 系列视为标准的大量生产的电子集成器件 - 严格的开发程序、严谨的测
试和丰富的使用经验最大限度降低了设计故障发生的可能性。总之,已使用 IEC 61508-2 附录 F 中建议的技术和措
施执行了 STM32 MCU 开发流程的内部合规评估。安全案例数据库(第 5 节 证据列表)保存了符合规范的证据。
硬件和软件诊断说明
本节列出了 STM32G0 Series 微控制器的安全分析中考虑的所有安全机制(硬件、软件和应用层面)。用户应熟悉
STM32G0 Series 架构,并将本文档与相关器件的数据手册、用户手册和参考信息结合使用。因此,为避免发生错
误并减少要显示的信息量,本文档中只包含了最低限度的功能细节。在下面的描述中,“安全机制”、“方法”或“要求”
将作为同义词使用。
UM2455
电气规范和环境限制
UM2455 - Rev 1
page 15/108
应用软件使整个系统处于其
安全状态
PEv使整个应用系统处于
其安全状态

请注意,
STM32G0 Series 的各个产品编号拥有不同的外设组合(例如,其中的一些没有配备 USB 外设)。为了
减少文档数量并避免无意义的重复,当前的安全手册(以及本节)适用于目标产品编号的所有可用外设。用户必须
选择他们的设备上实际提供的外设,并相应地忽略无意义的建议。
本节中提供的实现指导原则仅供参考。STM32G0 Series 安全分析期间 ST 执行的安全验证和本手册(或其附录)
中记录的相关诊断覆盖率数据都基于此类指导原则。为了清晰起见,针对 MCU 基础功能对安全机制进行了分组。
以表格的形式组织信息(每种安全机制一个)。
表 4 下面的 xxx 提供了每个字段的说明:
表 4. 安全机制字段说明
SM 代码
唯一的安全机制代码
/
标识符,也用在 FMEA 文档中。标识符使用 mmm_SM_x 模式,其中 mmm 是 3 或 4 个字母的模块缩
写,
“x”是递增编号。请注意,模块缩写和编号可能不按顺序和/或不同于通过原始文档获得的模块实际名称。
说明 简短的助记说明
所有权
ST
:表示硅晶上提供该方法
终端用户:终端用户必须通过应用软件修改、硬件解决方案或这两种方式实现方法。
具体实现 具体实现有时包括引入安全机制后的安全理念说明。
错误报告
描述如何向应用软件报告故障检测
故障检测时间 安全机制检测硬件故障所需的时间
已解决故障模型
通过诊断的故障模式(永久、瞬时或二者兼有)报告故障以及其他信息:
如果归类用于故障避免:有助于降低故障发生概率的方法
如果归类用于系统故障:设计用于减少应用软件设计中的系统错误(问题)的方法
取决于 MCU 配置
由于 STM32G0 系列中不同的型号引起安全机制或特征变化的报告
初始化 为了激活安全机制的作用要执行的特定操作
周期性
连续:安全机制以连续模式激活
定期:定期执行安全机制。请注意,仅当每 PST 至少执行一次时,安全机制才会影响诊断覆盖率
按需:在发生指定事件(例如,数据消息的接收)时激活安全机制
启动:应只在上电或离线维护期间执行安全机制。
诊断测试 报告特定程序(如果有并已推荐)以便在线测试安全机制的效力
多重故障保护 报告相关的安全机制以便正确管理多故障情景(参见
第 4.1.3 节 关于多故障情景的说明)。
建议和已知限制 其他字段中没有提供的额外建议或限制(如果有)
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 16/108
3.6.1
Arm
®
Cortex
®
-M0+ CPU
表 5. CPU_SM_0
SM 代码 CPU_SM_0
说明
Arm
®
Cortex
®
-M0+ CPU 的定期内核自测软件
所有权 终端用户或 ST
具体实现
软件测试围绕 IEC 61508:7 第 A.3.2 款(软件自测:漫步位(单通道))已处理的常见技术进行构建。为了达到要求的覆盖
率,通过具体分析所有 CPU 故障模式和相关故障模式的分布来指定自测软件。
错误报告 取决于具体实现
故障检测时间 取决于具体实现
已解决故障模型 永久
取决于 MCU 配置 无
初始化 无
周期性 定期
诊断测试 可根据选择的测试实现设计策略,在软件中嵌入自诊断功能。建议采用结果变量校验和保护和防御性编程。
多重故障保护 CPU_SM_5:外部看门狗
建议和已知限制
该方法是 STM32G0 Series 安全理念的主要内容。由于 MCU 外设的已定义诊断的主要部分以软件为基础,因此 CPU 完整
性是一个关键因素。
表 6. CPU_SM_1
SM 代码 CPU_SM_1
说明 应用软件中的控制流监控
所有权 终端用户
具体实现
对于永久故障,CPU 核心的故障分布的主要部分和与程序计数器失控或终止直接相关的故障模式有关。它们的内在本质决定
了不能通过标准软件测试方法(例如,SM_CPU_0)解决此类故障模式。因此,必须实现应用软件流的运行时间控制,以便
监控和检测此类故障导致的与预期行为的偏差。将该机制链接到看门狗触发可确保能够检测到严重失控状态(或者在最坏情
况下,程序计数器挂起)。
方法实现的指导原则如下:
• 充分记录并描述应用软件的不同内部状态(鼓励使用动态状态转换图)。
• 实现对应用软件每次不同状态间转换的正确性的监控。
• 检查异常应用软件程序循环期间所有预期状态之间的转换。
• 执行负责触发看门狗的函数以便强制触发(通过看门狗复位CPU阻止问题发生)同时也是上面描述的程序流控中
纠错的方式。
• 使用独立看门狗(IWDG)(或外部看门狗)的窗口功能有助于实现通过不同时钟源方式实现健控制流机制。
任何情况下,安全指标与使用的看门狗类型无关(采用独立或外部看门狗有助于缓解从属故障,参见第 4.2.2 节 时钟)
错误报告 取决于实现
故障检测时间 取决于实现。看门狗超时间隔为上限。
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 NA
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制 -
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 17/108
表 7. CPU_SM_2
SM 代码 CPU_SM_2
说明 应用软件中的双重计算
所有权 终端用户
具体实现
考虑安全相关计算的时序冗余,以检测影响 Arm
®
Cortex
®
-M0+ CPU 子部件(专用于数学计算和数据存取)的瞬时故障。
方法实现的指导原则如下:
• 如果错误结果可能干扰系统安全功能,则需对此类安全相关的计算进行双重计算。因此,必须在原始应用软件源代码
中仔细识别此类计算。
• 将数学运算和比较都当做计算。
• 使用原始数据的副本,并且如果可能的话使用等价公式进行第二次计算,来实现数学计算的冗余计算。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 瞬态
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护
CPU_SM_0:内核
定期自检软件
建议和已知限制 终端用户有责任小心地避免所用编译器优化功能的干预导致按照该使用条件引入的时序冗余被抵消。
表 8. CPU_SM_3
SM 代码 CPU_SM_3
说明
Arm
®
Cortex
®
-M0+ HardFault 异常
所有权 ST
具体实现
HardFault 异常生成是一种在 Arm
®
Cortex
®
-M0+核心中实现的固有的安全机制,主要致力于拦截由于软件缺陷或软件设计中
的错误导致的系统故障(例如,导致执行未定义的操作或未对齐的地址访问)。该安全机制还能检测 CPU 中导致上述异常
操作的硬件随机故障。
错误报告 高优先级中断事件
故障检测时间 取决于具体实现,参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 无
周期性 连续
诊断测试
可以编写测试程序来验证 HardFault 异常的生成;总之,鉴于在硬件随机故障检测方面的预期作用不大,不建议进行此类实
现。
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制 无
表 9. CPU_SM_4
SM 代码 CPU_SM_4
说明 应用软件的堆栈加固
所有权 终端用户
具体实现
为了解决影响 CPU 寄存器组的故障(主要是瞬时故障),需使用堆栈加固方法。该方法基于源代码修改,在寄存器传递至
被调用函数的信息中引入信息冗余。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 18/108
SM 代码 CPU_SM_4
方法实现的指导原则如下:
• 传递已传递参数值的冗余副本(可以对参数进行取反操作)并在函数中执行一致性检查。
• 传递已传递指针的冗余副本并在函数中执行一致性检查。
• 对于无冗余保护的参数,实施防御性编程技术(已传递值的真实性检查)。例如,将检查枚举字段的一致性。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
该方法与适用于软件开发的 IEC61508 标准要求的防御性编程技术存在部分重叠。因此,如果应用软件的安全完整性等级高
于或等于 SC2
,则可以优化
表 10. CPU_SM_5
SM 代码 CPU_SM_5
说明 外部看门狗
所有权 终端用户
具体实现
使用链接到控制流监控方法(参见 CPU_SM_1)的外部看门狗可解决 CPU 程序计数器或控制结构的故障模式。
可将外部看门狗设计为能够生成最终系统达到安全状态所需的信号组合。建议仔细检查假定安全要求中列出的系统安全状态
的相关假定要求。
它还有助于显著减少潜在的共因故障,因为外部看门狗有独立于 xxx 的时钟和供电。STM32G0 Series
错误报告 取决于实现
故障检测时间 取决于实现(看门狗超时间隔)
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 将从系统层面定义(合规项分析范围之外)
多重故障保护 CPU_SM_1:应用软件中的控制流监控
建议和已知限制 如果使用窗口看门狗,终端用户必须考虑应用软件执行中可能存在的容差,以避免伪错误报告(影响系统可用性)。
表 1
1. CPU_SM_6
SM 代码 CPU_SM_6
说明 独立看门狗
所有权 ST
具体实现 使用链接到控制流监控方法(参见 CPU_SM_1)的 IWDG 看门狗可解决 CPU 程序计数器或控制结构的故障模式。
错误报告 复位信号生成
故障检测时间 取决于实现(看门狗超时间隔)
已解决故障模型 永久
取决于 MCU 配置 无
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 19/108
SM 代码 CPU_SM_6
初始化 IWDG 激活。建议在选项字节设置中使用“硬件看门狗”(在复位后自动使能 IWDG)
周期性 连续
诊断测试 WDG_SM_1:启动时的看门狗软件测试
多重故障保护
CPU_SM_1:应用软件中的控制流监控
WDG_SM_0:配置寄存器的定期回读
建议和已知限制
IWDG 干预能够达到潜在“不完全”的局部安全状态,因为它只能保证 CPU 复位,而不保证仍能继续执行应用软件以生成外部
系统达到最终安全状态可能需要的输出信号组合。如果此限制变为阻塞点,则终端用户必须采用 CPU_SM_5。
表 12. CPU_SM_7
SM 代码 CPU_SM_7
说明 MPU - 存储器保护单元
所有权 ST
具体实现 CPU 存储器保护单元能够按照终端用户设定的标准检测对受保护存储区的非法访问。
错误报告 异常生成(MemManage)
故障检测时间 参见功能文档
已解决故障模型
系统(软件错误)
永久和瞬时(仅程序计数器和存储器存取故障)
取决于 MCU 配置 无
初始化 应在启动时设定 MPU 寄存器
周期性 在线
诊断测试 不需要
多重故障保护 MPU_SM_0:配置寄存器的定期回读
建议和已知限制
当在应用软件中实现了多重安全功能时,强烈建议使用存储分区并通过 MPU 功能提供保护。MPU 具体可用于
• 执行权限规则
• 单独处理
• 执行访问规则
MPU 的硬件随机故障检测功能仅限于主要影响程序计数器和存储器访问 CPU 功能的少数几种故障模式。因此,在
STM32G0 Series 安全理念的框架内,相关的诊断覆盖率预期将不那么重要。
表 13. MPU_SM_0
SM 代码 MPU_SM_0
说明 MPU 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 MPU 配置寄存器(即使未被终端用户应用软件使用)应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 20/108
SM 代码 MPU_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 21/108
3.6.2 嵌入式 FLASH
表 14. FLASH_SM_0
SM 代码 FLASH_SM_0
说明 闪存的定期软件测试
所有权 终端用户或 ST
具体实现
影响系统闪存、存储单元和地址解码器的永久故障通过专用软件测试来解决,该测试使用基于签名的技术检查存储单元内容
是否符合预期值。根据 IEC 61508:2 表 A.5,此类技术的有效诊断覆盖率取决于签名相对于要保护的信息块长的宽度 - 因
此,要仔细选择签名计算方法。请注意,简单签名方法(
IEC 61508:7 - A.4.2 改进校验和)还不够,它只能达到低覆盖率。
无需使用该测试处理信息块,因为在正常操作期间不使用信息块(无数据或程序提取)。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 闪存大小因产品编号而异
初始化 存储器签名也必须保存在闪存中。
周期性 定期
诊断测试 可根据选择的测试实现设计策略,在软件中嵌入自诊断功能。
多重故障保护
CPU_SM_1:应用软件中的控制流监控
CPU_SM_0:
内核定期自检软件
建议和已知限制
该测试预期会有较长的持续时间
- 因此必须考虑测试集成对应用软件执行的影响。
建议使用内部 CRC 模块。原则上,可以使用 DMA 功能进行数据传输。
可以从测试中排除未使用的闪存区。
表 15. FLASH_SM_1
SM 代码 FLASH_SM_1
说明 应用软件中的控制流监控
所有权 终端用户
具体实现
影响系统闪存、存储单元和地址解码器的永久和瞬时故障可能干扰 CPU 的存取操作,导致错误的数据或指令提取。
通过在从闪存加载的应用软件中实现控制流监控技术,可以检测此类故障。
有关实现的详细信息,参见 CPU_SM_1 的说明。
错误报告 取决于实现
故障检测时间 取决于实现。看门狗超时间隔为上限。
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 NA
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制 CPU_SM_1 的正确实现消除了此要求
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 22/108

表 16. FLASH_SM_2
SM 代码 FLASH_SM_2
说明
Arm
®
Cortex
®
-M0+ HardFault 异常
所有权 ST
具体实现
影响系统闪存(存储单元、地址解码器)的硬件随机故障(永久和瞬时)可导致错误的指令码提取,并最终产生 Arm
®
Cortex
®
-M0+ HardFault 异常。参见 CPU_SM_3 获取详细说明
错误报告 请参考 CPU_SM_3
故障检测时间 请参考 CPU_SM_3
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 请参考 CPU_SM_3
周期性 连续
诊断测试 请参考 CPU_SM_3
多重故障保护 请参考 CPU_SM_3
建议和已知限制 无
表 17. FLASH_SM_3
SM 代码 FLASH_SM_3
说明 选项字节写保护
所有权 ST
具体实现 该安全机制防止对选项字节的意外写入。鼓励使用该方法增强终端应用在发生系统故障时的稳健性。
错误报告 写保护异常
故障检测时间 不适用
已解决故障模型 无(仅系统故障)
取决于 MCU 配置 无
初始化 不需要(默认使能)
周期性 连续
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
该方法解决软件应用中的系统故障,在解决运行时间内影响选项字节值的硬件随机故障方面功效为零。因此,没有相关的
DC 值。
表 18. FLASH_SM_4
SM 代码 FLASH_SM_4
说明 静态数据封装
所有权 终端用户
具体实现
如果静态数据保存在闪存中,必须实现使用编码功能(例如,CRC)通过校验和字段进行封装。
在使用静态数据之前,通过应用软件检查校验和有效性。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 23/108
SM 代码 FLASH_SM_4
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 无
表 19. FLASH_SM_5
SM 代码 FLASH_SM_5
说明 具有负载验证的选项字节冗余
所有权 ST
具体实现
在每次上电复位后的选项字节加载期间,将进行选项字节的按位互补并验证其相应的互补选项字节。如不匹配,将报告错
误。
错误报告 生成选项字节错误(OPTERR)
故障检测时间 不适用
已解决故障模型 永久
取决于 MCU 配置 无
初始化 无(始终使能)
周期性 启动
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 无
表 20. FLASH_SM_6
SM 代码 FLASH_SM_6
说明 未使用闪存区填充码
所有权 终端用户
具体实现
未使用的闪存区必须填充确定数据。这种情况下,当程序计数器因影响 CPU 的瞬时故障跳出应用程序区时,系统将以确定
的方式演进。
错误报告 NA
故障检测时间 NA
已解决故障模型 无(避错)
取决于 MCU 配置 无
初始化 NA
周期性 NA
诊断测试 NA
多重故障保护 NA
建议和已知限制 填充代码可以是 NOP 指令或会导致 HardFault 异常的非法代码。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 24/108
表 21. FLASH_SM_7
SM 代码 FLASH_SM_7
说明 闪存上的 ECC
所有权 ST
具体实现
通过 ECC(纠错码)保护内部闪存,在双字(64 位)层面实现保护功能:
一位错误:纠正
两位错误:检测
错误报告
纠正:
• 在闪存 ECC 寄存器(FLASH_ECCR)中置位 ECCC(ECC 纠错)标志
• 生成中断
检测:
• 在 FLASH_ECCR 寄存器中置位 ECCD(ECC 检测)标志
• 生成 NMI
• 错误双字及其相关存储区的地址保存在 FLASH_ECCR 寄存器的 ADDR_ECC[20:0]和 BK_ECC 中
故障检测时间 在存储器读取期间检查 ECC 位。
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 无
周期性 连续
诊断测试 不需要
多重故障保护
FLASH_SM_0:闪存的定期软件测试
DIAG_SM_0:硬件诊断配置寄存器的定期回读
建议和已知限制 -
表 22. FLASH_SM_8
SM 代码 FLASH_SM_8
说明 读保护(RDP),写保护(WRP),专有代码读出保护(PCROP)
所有权 ST
具体实现
可使用这些保护功能保护闪存,防止非法读/写或擦除。通过这些技术与相关的不同保护级别的组合,终端用户能够构建有效
的访问保护策略。
错误报告 参见功能文档 - 某些情况下会生成 HardFault 错误
故障检测时间 参见功能文档
已解决故障模型 系统
取决于 MCU 配置 无
初始化 不需要
周期性 连续
诊断测试 不需要
多重故障保护 不需要
建议和已知限制
闪存访问策略的硬件随机故障检测功能仅限于主要影响程序计数器和闪存接口功能的少数几种边际故障模式。因此,在
STM32G0 Series 安全理念的框架内,相关的诊断覆盖率预期将不那么重要。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 25/108
表 23. FLASH_SM_9
SM 代码 FLASH_SM_9
说明 通过软件定期测试闪存地址解码器
所有权 终端用户
具体实现 影响系统闪存接口地址解码器的永久故障通过专用软件测试来处理,该测试检查存储单元内容是否符合预期值。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 闪存大小取决于产品编号
初始化 不需要
周期性 定期
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 可能与 FLASH_SM_0 实现存在重叠
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 26/108
3.6.3 内部 SRAM
表 24. RAM_SM_0
SM 代码 RAM_SM_0
说明 SRAM 存储器的定期软件测试
所有权 终端用户或 ST
具体实现
为了提高 SRAM 数据单元的覆盖率并确保对影响地址解码器的永久故障的充分覆盖,需要对系统 RAM 存储器执行定期软件
测试。算法的选择必须确保对 RAM 单元和地址解码器的目标 SFF 覆盖率。还必须收集所选方法覆盖有效性的证据。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 RAM 大小因产品编号而异
初始化 取决于实现
周期性 定期
诊断测试 可根据选择的测试实现设计策略,在软件中嵌入自诊断功能。
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
建议使用 March 测试 C-
。
由于该测试属于破坏性测试,必须实现 RAM 内容恢复。还必须考虑测试执行期间可能发生的对中断服务例程的干扰(例如
例程可能访问 RAM 中的无效内容)。
注意:可以从测试中排除未使用的 RAM 区,由终端用户负责获取最终应用软件的实际 RAM 使用情况。
表 25. RAM_SM_1
SM 代码 RAM_SM_1
说明 SRAM 上的奇偶校验
所有权 ST
具体实现 内部 SRAM 受额外奇偶校验位的保护(每字节 1 位)。在写入 SRAM 时,将计算并保存奇偶校验位。
错误报告
错误位标志置位 SYSCFG_CFGR2
NMI 生成
故障检测时间 在读取时检查奇偶校验位。
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 自举后,终端用户应使用选项字节 SYSCFG_CFGR2 使能奇偶校验。
周期性 连续
诊断测试 不需要
多重故障保护 DIAG_SM_0:硬件诊断配置寄存器的定期回读
建议和已知限制
建议在应用软件启动时通过软件初始化整个 SRAM2 存储器,以免在读取未初始化位置时发生奇偶校验错误。
鉴于奇偶校验保护仅限于 SRAM2,鼓励终端用户在 SRAM2 中保存所有安全相关数据(如可能),以实现此类额外的基于
硬件的快速诊断。
表 26. RAM_SM_2
SM 代码 RAM_SM_2
说明 应用软件的堆栈加固
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 27/108
SM 代码 RAM_SM_2
所有权 终端用户
具体实现
堆栈加固方法用于增强应用软件在发生影响地址解码器的 SRAM 故障时的稳健性。该方法基于源代码修改,在堆栈传递至被
调用函数的信息中引入信息冗余。如果最终的应用软件结构与编译器设置之间的组合要求大量使用堆栈来传递函数参数,则
方法的作用十分重要。
实现过程与方法 CPU_SM_4 相同
错误报告 请参考 CPU_SM_4
故障检测时间 请参考 CPU_SM_4
已解决故障模型 请参考 CPU_SM_4
取决于 MCU 配置 请参考 CPU_SM_4
初始化 请参考 CPU_SM_4
周期性 请参考 CPU_SM_4
诊断测试 请参考 CPU_SM_4
多重故障保护 请参考 CPU_SM_4
建议和已知限制 请参考 CPU_SM_4
表 27. RAM_SM_3
SM 代码 RAM_SM_3
说明 应用软件中安全相关变量的信息冗余
所有权 终端用户
具体实现
为了解决影响 SRAM 控制器的瞬时故障,要求对保存在 RAM 中的安全相关系统变量实现信息冗余。
该方法实现的指导原则如下:
• 充分识别并记录安全相关系统变量(就 RAM 读取故障导致的错误值会影响安全功能这一点而言)。
• 对于基于此类变量的算术计算或决策,执行两次并比较两个最终结果。
• 在两个冗余位置保存和更新安全相关变量,并在使用数据之前检查比较结果。
• 枚举字段必须使用非平凡值,每 PST 至少进行一次一致性检查
• 必须通过编码校验和(例如,
CRC)保护 SRAM 中保存的数据向量
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
该安全方法的实现与 Cortex
®
-M0+的已预见方法(CPU_SM_1)存在部分重叠;因此,两种方法的实现都可以进行优化。
表 28. RAM_SM_4
SM 代码 RAM_SM_4
说明 应用软件中的控制流监控
所有权 终端用户
具体实现
如果从 SRAM 执行终端用户应用软件,则影响存储器(存储单元和地址解码器)的永久和瞬时故障可能干扰程序执行。
为了解决此类故障,需要实施该方法。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 28/108
SM 代码 RAM_SM_4
有关实现的详细信息,参见 CPU_SM_1 的说明。
错误报告 取决于实现
故障检测时间 取决于实现。看门狗超时间隔为上限。
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 NA
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
仅在从 SRAM 执行应用软件时需要。
CPU_SM_1 的正确实现消除了此要求
表 29. RAM_SM_5
SM 代码 RAM_SM_5
说明 RAM 中应用软件的定期完整性测试
所有权 终端用户
具体实现
如果在 RAM 中执行应用软件或诊断库,则需要保护代码本身的完整性,防止软错误损坏和相关代码突变。该方法必须定期
通过校验和计算技术检查所保存代码的完整性(每 PST 至少一次)。关于实现详情,参见类似方法 FLASH_SM_0
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 定期
诊断测试 可根据选择的测试实现设计策略,在软件中嵌入自诊断功能。
多重故障保护
CPU_SM_0:
内核定期自检软件
CPU_SM_1:应用软件中的控制流监控
建议和已知限制 只能在从 RAM 执行应用软件或诊断库时实现该方法。
表 30. RAM_SM_6
SM 代码 RAM_SM_6
说明 读保护(RDP),写保护(WRP)
所有权 ST
具体实现
可使用这些保护功能保护 SRAM2 存储器,防止非法读/写或擦除。通过这些技术与相关的不同保护级别的组合,终端用户能
够构建有效的访问保护政策。
错误报告 参见功能文档 - 某些情况下会生成 HardFault 错误
故障检测时间 参见功能文档
已解决故障模型 系统
取决于 MCU 配置 SRAM2 大小因产品编号而异
初始化 不需要
周期性 连续
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 29/108
SM 代码 RAM_SM_6
诊断测试 不需要
多重故障保护 不需要
建议和已知限制
SRAM2 访问政策的硬件随机故障检测功能仅限于主要影响程序计数器和 SRAM2 接口功能的少数几种边际故障模式。因
此,在 STM32G0 Series 安全理念的框架内,相关的诊断覆盖率预期将不那么重要。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 30/108
3.6.4 系统总线架构
表 31. BUS_SM_0
SM 代码 BUS_SM_0
说明 互连的定期软件测试
所有权 终端用户
具体实现
需定期测试片内连接资源(总线矩阵、
AHB 或 APB 桥)进行永久故障检测。请注意,STM32G0 Series MCU 没有用于保护
这些结构的硬件安全机制。测试执行这些共享资源的连接测试,包括外设之间仲裁机制的测试。
根据 IEC 61508:2 表 A.8 和 A.7.4,该方法被认为能够达到高覆盖率
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 无
初始化 取决于实现
周期性 定期
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 可将实现视为与一些外设要求的广泛使用的“配置寄存器的定期回读”存在大部分重叠。
表 32. BUS_SM_1
SM 代码 BUS_SM_1
说明 片内数据交换中的信息冗余
所有权 终端用户
具体实现
该方法要求为 MCU 内部交换的每条数据消息添加某种冗余(例如,数据包层面的 CRC 校验和)。
在使用数据之前,通过应用软件使用校验和验证消息完整性。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 实现可能与要求为通信外设提供数据消息信息冗余的其他安全机制存在大部分重叠。因此,可以进行优化。
表 33. LOCK_SM_0
SM 代码 LOCK_SM_0
说明 配置选项的锁定机制
所有权 ST
具体实现
STM32G0 Series MCU 提供扩展保护,防止某些外设和系统寄存器发生意外的配置更改(例如,PVD_LOCK、定时器);
扩展保护检测软件应用中的系统故障。鼓励使用该方法增强终端应用在发生系统故障时的稳健性。
错误报告 未生成(被锁定时,将忽略寄存器重写)
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 31/108
SM 代码 LOCK_SM_0
故障检测时间 NA
已解决故障模型 无(仅系统故障)
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护 不需要
建议和已知限制 无相关 DC,因为该测试处理系统故障。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 32/108
3.6.5 EXTI 控制器
表 34. NVIC_SM_0
SM 代码 NVIC_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
通过定期检查配置寄存器以确定是否有系统外设不符合其预期值来实现该测试。预期值之前被保存在 RAM 中,并在每次配
置更改后及时更新。该方法主要通过检测寄存器内容中的位翻转来解决影响配置寄存器的瞬时故障。它还解决寄存器上的永
久故障,因为会在外设更新后在 PST 中至少执行一次该方法。
对于在设置错误时其内容可能干扰 NVIC 或 EXTI 行为的任何配置寄存器,都必须实现该方法。检查对象包括 NVIC 向量
表。
根据先进的汽车安全标准 ISO26262
,该方法可获得高诊断覆盖率(参见 ISO26262:5,表 D.4)
在签名理念的基础上,可以实现一种对 SRAM 空间要求更低的替代性有效实现:
• 连续读取要检查的外设寄存器,计算 CRC 校验和(鼓励使用硬件 CRC
)
• 将获得的签名与标准值进行比较(在每次寄存器更新后以相同方式计算,并保存在 SRAM 中)
• 通过应用软件检查签名的一致性
- 将签名不匹配视为检测失败。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 必须在启动后执行首次检查之前读取配置寄存器的值。
周期性 定期
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
该方法只解决影响配置寄存器的故障,而不是外设核心逻辑或外部接口。
必须注意包含配置与状态位的混合组合的寄存器。在保存影响签名的寄存器内容之前,必须使用掩码,并执行相关检查以避
免假阳性检测。
表 35. NVIC_SM_1
SM 代码 NVIC_SM_1
说明 预期和意外中断检查
所有权 终端用户
具体实现
根据 IEC 61508:2 表 A.1 的建议,必须实现针对中断连续、缺失或交叉的诊断措施。在应用软件层面实现预期和意外中断检
查方法。
方法实现的指导原则如下:
• 充分记录 MCU 的已实现中断列表,并尽可能报告每个请求的预期频率(例如与 ADC 转换完成相关的中断,因此是一
种确定的方式)。
• 为服务的每种中断请求提供单独的计数器,以便检测给定时间帧内:a)没有中断请求产生;b)过多的中断请求
(“babbling idiot
”中断源)。必须按照具体的中断预期频率调整对时间帧持续时间的控制。
• 与未使用的中断源相关的中断向量指向默认处理程序,它会在触发时报告故障情况(意外中断)。
• 如果不同的源之间共享中断服务例程,则实现对调用者身份的真实性检查。
• 使用此处描述的相同方法处理与非安全相关外设相关的中断请求,不考虑它们的发起者安全分类。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 33/108

SM 代码 NVIC_SM_1
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 为了降低方法实现的复杂性,建议使用轮询技术(如可能)而不是中断来实现终端系统。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 34/108

3.6.6 直接存储器访问控制器(DMA/ DMAMUX)
表 36. DMA_SM_0
SM 代码 DMA_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 DMA 配置寄存器和通道地址寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 37. DMA_SM_1
SM 代码 DMA_SM_1
说明 通过 DMA 传输的数据包的信息冗余
所有权 终端用户
具体实现
通过使用编码功能为 DMA 传输的数据包添加冗余检查(例如 CRC 或类似检查)来实现该方法。完整数据包冗余是一种过度
行为。
校验和编码功能必须足够稳健,以保证数据包中单个位反转的发现概率至少为 90%
在使用数据之前,必须通过应用软件检查数据包的一致性。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制 举例来说,对于校验和的编码功能,只使用逐位相加是不合适的。
表 38. DMA_SM_2
SM 代码 DMA_SM_2
说明 通过 DMA 传输的数据包的信息冗余,包括发送者和接收者标识符
所有权 终端用户
具体实现
该方法有助于识别 MCU 内部通过 DMA 交换的消息的来源和发起者。
通过为受保护消息添加额外字段来实现,MCU 层面有固定的编码约定用于识别消息类型。识别字段的指导原则如下:
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 35/108

SM 代码 DMA_SM_2
• DMA 事务的每一对可能的发送者或接收者必须具有不同的识别字段值
• 选择的值必须是枚举型非平凡值
• 在使用数据之前,通过应用软件检查识别字段值与消息类型是否相符。
当与 DMA_SM_4 一起实现时,该方法在源和目标实体之间提供一种“
虚拟通道”
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核
定期自检软件
建议和已知限制 无
表 39. DMA_SM_3
SM 代码 DMA_SM_3
说明 DMA 的定期软件测试
所有权 终端用户
具体实现
该方法要求定期测试 DMA 基础功能,通过从一个源到另一个源(例如,从存储器到存储器)的数据包确定传输和在目标上
检查消息传输的正确性来实现。数据包由非平凡模式构成(避免使用值 0x0000、0xFFFF),并且其组织方式允许在检查以
下故障期间进行检测:
• 不完全打包传输
• 单个传输字中发生错误
• 打包传输数据中的顺序错误
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 无
初始化 取决于实现
周期性 定期
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制 无
表 40. DMA_SM_4
SM 代码 DMA_SM_4
说明 DMA 事务感知
所有权 终端用户
具体实现
DMA 事务是非确定性事务,因为它通常由外部事件驱动,例如通信消息接收。总之,设计周密的安全系统应尽可能全面地
控制事件 - 例如可参考 IEC61508:3 表格 2 第 13 项要求了解软件架构。
该方法建立在系统已知预期 DMA 事务的频率和类型的基础上。例如,外接传感器应定期向 STM32 外设发送某些消息。通
过专用状态机监控 DMA 事务,将能够检测缺失或意外的 DMA 活动。
错误报告 取决于实现
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 36/108

SM 代码 DMA_SM_4
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 由于 DMA 事务终止通常与中断生成有关,可将该方法的实现与安全机制 NVIC_SM_1(预期和意外中断检查)合并
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 37/108

3.6.7 通用同步/异步收发器(USART)1/2/3/4、低功耗通用异步收发器(LPUART1)
表 41. UART_SM_0
SM 代码 UART_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 UART 配置寄存器应用该方法。
关于实现该方法的详细信息,可在 EXTI 控制器中找到。
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 42. UART_SM_1
SM 代码 UART_SM_1
说明 协议错误信号
所有权 ST
具体实现
USART 通信模块内置协议错误检查(例如,额外校验位检查、上溢和帧错误),用于检测网络相关异常情况。总之,这些
机制能够检测影响模块本身的硬件随机故障的边际百分比。
通常在标准通信软件中处理连接到这些检查器的错误信号,从而减少开销。
错误报告 生成错误标志和可选中断事件
故障检测时间 取决于外设配置(例如,波特率),参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护 UART_SM_2:消息的信息冗余技术
建议和已知限制 USART 通信模块具备多种不同配置 - 通信错误检查的实际构成取决于选择的配置。
表 43. UART_SM_2
SM 代码 UART_SM_2
说明 消息的信息冗余技术
所有权 终端用户
具体实现
通过使用编码功能为 UART 传输的数据包添加冗余检查(例如 CRC 或类似检查)来实现该方法。校验和编码功能必须足够
稳健,以保证数据包中单个位反转的发现概率至少为 90%。
在使用数据之前,必须通过应用软件检查数据包的一致性。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 38/108
SM 代码 UART_SM_2
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:内核
定期自检软件
建议和已知限制
假定 UART 通信的另一方具有执行所述检查的同等能力。
不应使用传输完全冗余(消息重复),因为其检测能力仅限于通信单元故障模式的一个子集。
举例来说,对于校验和的编码功能,只使用逐位相加是不合适的。
表 44. UART_SM_3
SM 代码 UART_SM_3
说明 消息的信息冗余技术,包括端到端安全
所有权 终端用户
具体实现
该方法旨在保护外设与其外部通信对象之间的通信。
参见 CAN_SM_2 说明获取详细信息。
错误报告 请参考 CAN_SM_2
故障检测时间 请参考 CAN_SM_2
已解决故障模型 请参考 CAN_SM_2
取决于 MCU 配置 请参考 CAN_SM_2
初始化 请参考 CAN_SM_2
周期性 请参考 CAN_SM_2
诊断测试 请参考 CAN_SM_2
多重故障保护 请参考 CAN_SM_2
建议和已知限制
重要说明:假定通讯另一端具有执行所述检查的同等能力。参见
CAN_SM_2 获取更多说明
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 39/108
3.6.8 内部集成电路(I2C)1/2
表 45. IIC_SM_0
SM 代码 IIC_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 I2C 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 46. IIC_SM_1
SM 代码 IIC_SM_1
说明 协议错误信号
所有权 ST
具体实现
I2C 通信模块内置协议错误检查(例如,上溢、下溢、数据包等),用于检测网络相关异常情况。总之,这些机制能够检测
影响模块本身的硬件随机故障的边际百分比。
错误报告 生成错误标志和可选中断事件
故障检测时间 取决于外设配置(例如,波特率),参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护 IIC_SM_2:消息的信息冗余技术
建议和已知限制 采用 SMBus 选项将授权激活更高效的协议层面硬件检查,例如 CRC-8 数据包保护
表 47. IIC_SM_2
SM 代码 IIC_SM_2
说明 消息的信息冗余技术
所有权 终端用户
具体实现
通过使用编码功能为 I2C 传输的数据包添加冗余检查(例如 CRC 或类似检查)来实现该方法。校验和编码功能必须足够稳
健,以保证数据包中单个位反转的发现概率至少为 90%。
在使用数据之前,必须通过应用软件检查数据包的一致性。
错误报告 取决于实现
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 40/108

SM 代码 IIC_SM_2
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
假定 I2C 通信的另一方具有执行所述检查的同等能力。
不应使用传输完全冗余(消息重复),因为其检测能力仅限于通信单元故障模式的一个子集。
举例来说,对于校验和的编码功能,只使用逐位相加是不合适的。
如果能够通过硬件插入 CRC,则以 IIC_SM_3 取代该方法
表 48. IIC_SM_3
SM 代码 IIC_SM_3
说明 CRC 数据包层面
所有权 ST
具体实现 I2C 通信模块能够为特定操作模式(SMBus)激活向包数据自动插入(和检查)CRC 校验和。
错误报告 生成错误标志和可选中断事件
故障检测时间 取决于外设配置(例如,波特率),参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护 IIC_SM_2:消息的信息冗余技术
建议和已知限制 无
表 49. IIC_SM_4
SM 代码 IIC_SM_4
说明 消息的信息冗余技术,包括端到端安全
所有权 终端用户
具体实现
该方法旨在保护 I2C 外设与其外部通信对象之间的通信。
参见 CAN_SM_2 说明获取详细信息。
错误报告 请参考 CAN_SM_2
故障检测时间 请参考 CAN_SM_2
已解决故障模型 请参考 CAN_SM_2
取决于 MCU 配置 请参考 CAN_SM_2
初始化 请参考 CAN_SM_2
周期性 请参考 CAN_SM_2
诊断测试 请参考 CAN_SM_2
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 41/108
SM 代码 IIC_SM_4
多重故障保护 请参考 CAN_SM_2
建议和已知限制
重要说明:假定 I2C 通信的另一方具有执行所述检查的同等能力。
参见 CAN_SM_2 获取更多说明
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 42/108
3.6.9 串行外设接口(SPI)1/2
表 50. SPI_SM_0
SM 代码 SPI_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 SPI 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 51. SPI_SM_1
SM 代码 SPI_SM_1
说明 协议错误信号
所有权 ST
具体实现
SPI 通信模块内置协议错误检查(例如,上溢、下溢、超时等),用于检测网络相关异常情况。总之,这些机制能够检测影
响模块本身的硬件随机故障的边际百分比。
错误报告 生成错误标志和可选中断事件
故障检测时间 取决于外设配置(例如,波特率),参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 NA
多重故障保护 SPI_SM_2:消息的信息冗余技术
建议和已知限制 无
表 52. SPI_SM_2
SM 代码 SPI_SM_2
说明 消息的信息冗余技术
所有权 终端用户
具体实现
通过使用编码功能为 SPI 传输的数据包添加冗余检查(例如 CRC 或类似检查)来实现该方法。校验和编码功能必须足够稳
健,以保证数据包中单个位反转的发现概率至少为 90%。
在使用数据之前,必须通过应用软件检查数据包的一致性。
错误报告 取决于实现
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 43/108

SM 代码 SPI_SM_2
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
假定 SPI 通信的另一方具有执行所述检查的同等能力。
不应使用传输完全冗余(消息重复),因为其检测能力仅限于通信单元故障模式的一个子集。
举例来说,对于校验和的编码功能,只使用逐位相加是不合适的。
如果能够通过硬件插入 CRC,则以 SSP_SM_3 取代该方法
表 53. SPI_SM_3
SM 代码 SPI_SM_3
说明 CRC 数据包层面
所有权 ST
具体实现 SPI 通信模块能够激活向包数据自动插入(和检查)CRC-8 或 CRC-18 校验和
错误报告 生成错误标志和可选中断事件
故障检测时间 取决于外设配置(例如,波特率),参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护 SPI_SM_2:消息的信息冗余技术
建议和已知限制 无
表 54. SPI_SM_4
SM 代码 SPI_SM_4
说明 消息的信息冗余技术,包括端到端安全
所有权 终端用户
具体实现
该方法旨在保护 SPI 外设与其外部通信对象之间的通信。
参见 CAN_SM_2 说明获取详细信息。
错误报告 请参考 CAN_SM_2
故障检测时间 请参考 CAN_SM_2
已解决故障模型 请参考 CAN_SM_2
取决于 MCU 配置 请参考 CAN_SM_2
初始化 请参考 CAN_SM_2
周期性 请参考 CAN_SM_2
诊断测试 请参考 CAN_SM_2
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 44/108
SM 代码 SPI_SM_4
多重故障保护 请参考 CAN_SM_2
建议和已知限制
重要说明:假定 SPI 通信的另一方具有执行所述检查的同等能力。
参见 CAN_SM_2 获取更多说明
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 45/108

3.6.10 USB Type-C™ / USB Power Delivery 接口(UCPD)
表 55. USB_SM_0
SM 代码 USB_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 USB 配置寄存器应用该方法。
关于实现该方法的详细信息,可在 EXTI 控制器中找到。
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 56. USB_SM_1
SM 代码 USB_SM_1
说明 协议错误信号
所有权 ST
具体实现
USB 通信模块内置协议错误检查(例如,上溢、下溢、NRZI、比特填充等),用于检测网络相关异常情况。总之,这些机
制能够检测影响模块本身的硬件随机故障的边际百分比。
错误报告 生成错误标志和可选中断事件
故障检测时间 取决于外设配置(例如,波特率),参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护 USB_SM_2:消息的信息冗余技术
建议和已知限制 无
表 57. USB_SM_2
SM 代码 USB_SM_2
说明 消息的信息冗余技术
所有权 ST 或终端用户
具体实现 实现所需消息信息冗余,USB 通信模块具备硬件功能。它本质上能够激活向包数据自动插入(和检查)CRC 校验和。
错误报告 生成错误标志和可选中断事件
故障检测时间 取决于外设配置(例如,波特率),参见功能文档
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 46/108
SM 代码 USB_SM_2
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 错误报告配置(如果计划了中断事件)
周期性 连续
诊断测试 不需要
多重故障保护 USB_SM_2:消息的信息冗余技术
建议和已知限制 无
表 58. USB_SM_3
SM 代码 USB_SM_3
说明 消息的信息冗余技术,包括端到端安全
所有权 终端用户
具体实现
该方法旨在保护 USB 外设与其外部通信对象之间的通信。
参见 CAN_SM_2 说明获取详细信息。
错误报告 请参考 CAN_SM_2
故障检测时间 请参考 CAN_SM_2
已解决故障模型 请参考 CAN_SM_2
取决于 MCU 配置 请参考 CAN_SM_2
初始化 请参考 CAN_SM_2
周期性 请参考 CAN_SM_2
诊断测试 请参考 CAN_SM_2
多重故障保护 请参考 CAN_SM_2
建议和已知限制
当使用了 USB 批量或同步传输时,该方法适用。对于其他传输模式,USB 硬件协议已实现该要求的多个特性。
参见 CAN_SM_2 获取更多说明
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 47/108
3.6.11 模数转换器 (ADC)
表 59. ADC_SM_0
SM 代码 ADC_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 ADC 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 60. ADC_SM_1
SM 代码 ADC_SM_1
说明 通过应用软件进行多重采集
所有权 终端用户
具体实现
该方法通过对同一输入信号执行多重采集来实现时序信息冗余。然后,通过滤波器算法组合多重采集数据以确定信号的正确
值。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制
通常通过终端用户应用软件的设计来满足该建议。在工业应用中,在使用多重采集后进行平均操作是一种常用技术,用于克
服传感器线上的伪 EMI 干扰。
表 61. ADC_SM_2
SM 代码 ADC_SM_2
说明 通过应用软件进行范围检查
所有权 终端用户
具体实现
方法实现的指导原则如下:
• 调查并充分记录要获取的数据的预期范围。请注意,在设计良好的应用中,正常操作期间的输入信号不大可能十分
接近或超过上限和下限限值(信号采集饱和)。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 48/108
SM 代码 ADC_SM_2
• 如果应用软件识别出系统状态,将在范围检查实现中使用该信息。例如,如果 ADC 值是通过功率负载的电流测量
值,读取到异常值(例如电流与负载供应反向)可能表示采集模块中存在故障。
• 由于 ADC 模块是可能与不同外部源之间共享的,组合采集的不同信号的真实性检查可能有助于以十分高效的方式覆
盖整个输入范围。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制 该安全机制的实现(和相关诊断效率)严重依赖于应用。
表 62. ADC_SM_3
SM 代码 ADC_SM_3
说明 ADC 的定期软件测试
所有权 终端用户
具体实现
该方法的实现方式是采集多个信号并将读出值与已知的预期值进行比较。方法实现可能有不同复杂度级别:
• 基础复杂度:上限或下限(VDD 或 VSS)以及内部参考电压的采集与检查
• 高复杂度:除了基本复杂度测试,还采集连接到 ADC 输入的 DAC 输出并检查所有电压偏移和线性度
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 无
初始化 取决于实现
周期性 定期
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制 可使用两种不同复杂度方法的组合来更好地优化高需求安全功能的测试频率。
表 63. ADC_SM_4
SM 代码 ADC_SM_4
说明 ADC 输入的 1oo2 方案
所有权 终端用户
具体实现
该安全机制的实现方法是,使用两个不同 SAR ADC 通道采集相同输入信号。应用软件检查两个读数是否一致。
建议使用属于不同 ADC 模块的两个不同 ADC 通道。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 49/108
SM 代码 ADC_SM_4
周期性 按需
诊断测试 不需要
多重故障保护 ADC_SM_0:ADC 配置寄存器的定期回读
建议和已知限制 该方法可与 ADC_SM_0/ ADC_SM_2/ ADC_SM_3 结合使用,以达到最高 ADC 模块诊断覆盖率。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 50/108
3.6.12 数模转换器 (DAC)
表 64. DAC_SM_0
SM 代码 DAC_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 DAC 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 65. DAC_SM_1
SM 代码 DAC_SM_1
说明 ADC 通道上的 DAC 输出环回
所有权 终端用户
具体实现 通过将激活的 DAC 输出路由到一个 ADC 通道并检查输出电流值是否符合其预期值来实现。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续或按需
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制
处理瞬时故障的效率与最终应用的特性有关。我们将 Tm 定义为触发相关安全功能所需的 DAC 错误信号的最短持续时间。
执行测试频率高于 1/Tm 时效率最高
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 51/108

3.6.13 比较器 (COMP)
表 66. COMP_SM_0
SM 代码 COMP_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 COMP 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 67. COMP_SM_1
SM 代码 COMP_SM_1
说明 比较器的 1oo2 方案
所有权 终端用户
具体实现 该安全机制的实现方法是,使用两个内部比较器做出相同决策。这要求对比较器投票进行相应处理。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制 该方法与“窗口”比较器功能不兼容
表 68. COMP_SM_2
SM 代码 COMP_SM_2
说明 输入的真实性检查
所有权 终端用户
具体实现 该方法用于在专用 ADC 通道上冗余采集比较器功能的模拟输入,并通过测量值定期检查比较器输出的一致性。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 52/108

取决于 MCU 配置 无
初始化 取决于实现
周期性 定期
诊断测试 不需要
多重故障保护
CPU_SM_0:内核
定期自检软件
建议和已知限制 无
表 69. COMP_SM_3
SM 代码 COMP_SM_3
说明 通过应用软件进行多重采集
所有权 终端用户
具体实现
该方法要求应用软件不按照比较器单脉冲转换进行决策,而是在多个事件后或比较器触发条件存在特定的时间段后进行决
策。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 瞬态
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制
通常在终端用户应用上通过设计满足该建议 - 在工业应用中,多重采集是一种常用技术,用于克服传感器线上的伪 EMI 干
扰。
表 70. COMP_SM_4
SM 代码 COMP_SM_4
说明 比较器锁定机制
所有权 ST
具体实现 该安全机制防止比较器控制和状态寄存器发生配置变化;因此,它解决软件应用中的系统故障。
错误报告 NA
故障检测时间 NA
已解决故障模型 无(避错)
取决于 MCU 配置 无
初始化 必须使用 COMP_CSR 寄存器中的 COMPxLOCK 位使能锁定保护。
周期性 连续
诊断测试 NA
多重故障保护 NA
建议和已知限制 该方法不解决软错误导致的比较器配置变化。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 53/108
3.6.14 基本定时器 TIM 6/7
表 71. GTIM_SM_0
SM 代码 GTIM_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对通用计数器定时器 TIM6 或 TIM7 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 72. GTIM_SM_1
SM 代码 GTIM_SM_1
说明 计数定时器的 1oo2
所有权 终端用户
具体实现
该方法通过软件在两个计数资源之间实现 1oo2 方案。
方法实现的指导原则如下:
• 使用相同时基或频率设定两个定时器。
• 对于用作时基的定时器:在应用软件中使用一个定时器作为时基源,另一个仅用于检查。在应用层面执行 1oo2 的一致
性检查,在每次使用定时器值时比较两个计数器值以影响安全功能。
• 在中断生成时使用:使用第一个定时器作为服务例程的主要中断源,并使用第二个定时器作为中断例程开始时要检查
的
“参考”。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 为避免得到假阳性诊断结果,建议在定时器检查中实现容差。
3.6.15 高级、通用和低功耗定时器 TIM1/2/3/14/15/16/17 LPTIM1/2
提示 由于定时器配备许多不同通道,这些通道彼此独立,并能设定用于实现不同功能,因此要为每个通道单独选择安
全机制。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 54/108
表 73. A
TIM_SM_0
SM 代码 ATIM_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对高级、通用和低功耗定时器 TIM1/2/3/4/5/8/15/16/17 LPTIM1/2 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 74. A
TIM_SM_1
SM 代码 ATIM_SM_1
说明 计数定时器的 1oo2
所有权 终端用户
具体实现
该方法通过软件在两个计数资源之间实现 1oo2 方案。
方法实现的指导原则如下:
• 使用相同时基或频率设定两个定时器。
• 对于用作时基的定时器:在应用软件中使用一个定时器作为时基源,另一个仅用于检查。在应用层面执行 1oo2 的一致
性检查,在每次使用定时器值时比较两个计数器值以影响安全功能。
• 在中断生成时使用:使用第一个定时器作为服务例程的主要中断源,并使用第二个定时器作为中断例程开始时要检查
的
“参考”。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
为避免得到错误的诊断结果,建议在定时器检查中实现容差。
该方法适用于只用作经过时间计数器的定时器通道。
表 75. A
TIM_SM_2
SM 代码 ATIM_SM_2
说明 输入捕获定时器的 1oo2
所有权 终端用户
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 55/108
SM 代码 ATIM_SM_2
具体实现
该方法设计用于保护用于外部信号捕获和测量(例如“输入捕获”和“编码器读取”)的定时器。方法实现要求将外部信号也连接
到冗余定时器,并在应用层面对测得的数据执行一致性检查。
定时器之间的一致性检查将在每次应用软件使用读数时执行。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:内核
定期自检软件
建议和已知限制 为减少共因故障的潜在影响,建议对属于不同定时器模块并映射到器件封装上非相邻引脚的通道使用冗余检查。
表 76. A
TIM_SM_3
SM 代码 ATIM_SM_3
说明 PWM 输出的环回方案
所有权 终端用户
具体实现
通过将 PWM 连接到单独的定时器通道以获取生成的波形特性来实现该方法。
指导原则如下:
• 测量 PWM 频率和占空比并检查是否符合预期值。
• 为减少共因故障的潜在影响,建议对属于不同定时器模块并映射到器件封装上非相邻引脚的通道使用环回检查。
该措施可以由终端用户负责用最终应用中已有的评级相同的其他环回方案来取代。例如,如果使用 PWM 驱动外部功率负
载,可以使用在线电流值的读数而不是 PWM 占空比测量值。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制
处理瞬时故障的效率与最终应用的特性有关。我们将 Tm 定义为触发相关安全功能所需的 PWM 错误信号(错误频率、错误
占空比或二者兼有)的最短持续时间。执行测试频率高于 1/Tm 时效率最高
表 77. ATIM_SM_4
SM 代码 ATIM_SM_4
说明 定时器的锁定位保护
所有权 ST
具体实现 该安全机制使终端用户能够锁定指定的配置选项,避免应用软件进行意外修改。因此,它解决软件开发的系统故障。
错误报告 NA
故障检测时间 NA
已解决故障模型 无(避错)
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 56/108

SM 代码 ATIM_SM_4
取决于 MCU 配置 无
初始化 必须使用 TIMx_BDTR 寄存器中的 LOCK 位使能锁定保护。
周期性 连续
诊断测试 NA
多重故障保护 NA
建议和已知限制 该方法不解决软错误导致的定时器配置变化。
提示
这里没有单独提及
IRTIM
,它主要通过
TIM16
和
TIM17
功能实现。请参见相关指示。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 57/108
3.6.16 通用输入/输出(GPIO)
表 78. GPIO_SM_0
SM 代码 GPIO_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 GPIO 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 GPIO 可用性因产品编号而异
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 79. GPIO_SM_1
SM 代码 GPIO_SM_1
说明 输入 GPIO 线的 1oo2
所有权 终端用户
具体实现
该方法适用于将 GPIO 线用作输入的情况。通过将外部的安全相关信号连接到两个独立的 GPIO 线来实现。在每次使用信号
影响应用软件的行为时,应用软件比较两个 GPIO 值。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制
为了减少共因故障的潜在影响,建议使用 GPIO 线:
• 属于不同 I/O 端口(例如,端口 A 和 B
)
• 具有不同位号(例如,
PORTA.1 和 PORTB.5)
• 映射到器件封装上的不相邻引脚
表 80. GPIO_SM_2
SM 代码 GPIO_SM_2
说明 输出 GPIO 线的环回模式
所有权 终端用户
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 58/108
SM 代码 GPIO_SM_2
具体实现
该方法适用于将 GPIO 线用作输出的情况。通过环回方案(将输出连接到设定为输入的不同 GPIO 线)和使用输入线检查输
出端口的预期值来实现。应用软件定期以及每次更新输出时执行比较。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
为了减少共因故障的潜在影响,建议使用 GPIO 线:
• 属于不同 I/O 端口(例如,端口 A 和 B)
• 具有不同位号(例如,
PORTA.1 和 PORTB.5)
• 映射到器件封装上的不相邻引脚
处理瞬时故障的效率与最终应用的特性有关。我们将 Tm 定义为触发相关安全功能所需的 GPIO 输出错误信号的最短持续时
间。执行测试频率高于 1/Tm 时效率最高
表 81. GPIO_SM_3
SM 代码 GPIO_SM_3
说明 GPIO 端口配置锁定寄存器
所有权 ST
具体实现
该安全机制防止 GPIO 寄存器发生配置变化;因此,它解决软件应用中的系统故障。
鼓励使用该方法增强终端应用在发生系统故障时的稳健性
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 无(仅系统故障)
取决于 MCU 配置 无
初始化 在应用软件写入最终的 GPIO 配置后,必须对 GPIOx_LCKR 的位 16(LCKK)应用正确的写序列。
周期性 连续
诊断测试 不需要
多重故障保护 不需要
建议和已知限制 该方法不解决可能在运行时间导致 GPIO 寄存器上位翻转的瞬时故障(软错误)。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 59/108
3.6.17 实时时钟模块(R
TC)
表 82. RTC_SM_0
SM 代码 RTC_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 R
TC 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 83. RTC_SM_1
SM 代码 RTC_SM_1
说明 运行 RTC 的应用检查
所有权 终端用户
具体实现
应用软件对 RTC 日历或时间数据实施某种真实性检查,主要在上电后和 RTC 执行后续日期读取后。
方法实现的指导原则如下:
• 使用 RTC 备份寄存器保存编码信息,以便检测掉电期间是否缺失 VBAT。
• 使用 RTC 备份寄存器按当前日期或时间定期保存压缩信息
• 应用软件在上电后执行最低限度的日期读数一致性检查(检测
“过去”日期或时间检索)。
• 应用软件定期检查 RTC 是否真正在运行,方法是读取 RTC 时间戳进度并与基于 STM32 内部时钟或定时器的经过时
间测量值进行比较。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 定期
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制
该方法为 RTC 故障模式提供有限的诊断覆盖率。对于 RTC 时间戳精度可能严重影响安全功能(例如,医疗数据存储设备)
的终端用户应用,强烈建议采用更有效的系统层面措施。
表 84. RTC_SM_2
SM 代码 RTC_SM_2
说明 用于检测时间戳/事件捕获中的故障的应用层面措施
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 60/108
SM 代码 RTC_SM_2
所有权 终端用户
具体实现
该方法必须能够检测影响 RTC 功能的故障,以便正确执行时间戳
/事件捕获功能。由于该解决方案严格取决于应用,此处未
给出其实现方式的详细指导原则。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 定期
/按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自测软件
建议和已知限制
仅当在安全功能实现中使用了时间戳/事件捕获功能时,才必须使用该方法。值得注意的是,假定要求 ASR7(参考假定安全
要求)禁止在 MCU 处于睡眠或停止模式的安全相关应用中使用时间戳/事件捕获。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 61/108
3.6.18 入侵和备份寄存器(T
AMP)
表 85. T
AMP_SM_0
SM 代码 TAMP_SM_0
说明 入侵备份寄存器的信息冗余
所有权 终端用户
具体实现
必须通过具有编码功能的校验和(例如,
CRC)保护入侵备份寄存器中保存的数据。在使用保存的数据之前,应用软件必须
检查校验和。
该方法将保证数据不会因备用电池故障而被擦除。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 无
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 62/108
3.6.19 电源控制
表 86. VSUP_SM_0
SM 代码 VSUP_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 87. VSUP_SM_1
SM 代码 VSUP_SM_1
说明 电源电压内部监控(PVD)
所有权 ST
具体实现
该器件还有一个嵌入式可编程电压检测器 (PVD),用于监视 VDD 电源并将其与 VPVD 阈值进行比较。当 VDD 低于 VPVD
阈值和/或 VDD 高于 VPVD 阈值时,将产生中断。
错误报告 中断事件生成
故障检测时间 取决于阈值设定,参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 通过功率控制寄存器(PWR_CR)中的 PVDE 位和阈值设定使能保护
周期性 连续
诊断测试 VSUP_SM_0:配置寄存器的定期回读
多重故障保护 CPU_SM_5:外部看门狗
建议和已知限制
内部监控 PVD 处理与错误 VDD 值相关的故障的能力有限。如果实现特定的功耗模式,可以通过 VSUP_SM_4(PVM)集
成(即,将某些独立电源直接连接到 VDD,以便使用 PVD 和 PVM 控制 VDD 的高和低阈值)。
内部监控 PVD 解决影响 STM32G0 Series 内部调压器的故障的能力有限。参见设备 FMEA 了解详情。
表 88. VSUP_SM_2
SM 代码 VSUP_SM_2
说明 独立看门狗
所有权 ST
具体实现
独立看门狗通过 VDD 直接馈给;因此,数字逻辑(核心或外设)电源的重大故障不会影响其行为,但可能导致 IWDG 超时
违规。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 63/108
SM 代码 VSUP_SM_2
错误报告 复位信号生成
故障检测时间 取决于实现(看门狗超时间隔)
已解决故障模型 永久
取决于 MCU 配置 无
初始化 IWDG 激活。建议在选项字节设置中使用“硬件看门狗”(在复位后自动使能 IWDG)
周期性 连续
诊断测试 不需要
多重故障保护 CPU_SM_1:应用软件中的控制流监控
建议和已知限制 外部看门狗(参见 CPU_SM_5)可保证相同保护级别
表 89. VSUP_SM_3
SM 代码 VSUP_SM_3
说明 内部温度传感器检查
所有权 终端用户
具体实现
必须定期测试内部温度传感器,以便检测模温的异常上升 - 电源电压系统中的硬件故障可能导致功耗过高,进而引起温度上
升。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 无
初始化 无
周期性 定期
诊断测试 不需要
多重故障保护 VSUP_SM_3:电源电压内部监控(PVD)
建议和已知限制
该方法还降低了影响 MCU 和导致温度过高的共因发生的可能性。
参见数据手册以设置温度阈值。
表 90. VSUP_SM_4
SM 代码 VSUP_SM_4
说明 外设电压监测(PVM)
所有权 ST
具体实现
该器件还有一个嵌入式可编程电压检测器(PVM),用于监控 3 个独立电源并将其与阈值进行比较。当独立电源电压低于低
阈值或高于高阈值时,会生成中断。
错误报告 特定 EXTI 线上生成中断
故障检测时间 取决于阈值设定,参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 在电源控制寄存器中对所选电源轨执行保护使能和阈值设定。
周期性 连续
诊断测试 不需要
多重故障保护 CPU_SM_5:外部看门狗
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 64/108

SM 代码 VSUP_SM_4
建议和已知限制 该方法可与 VSUP_SM_0 结合使用,以实现 VDD 值的全面监控。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 65/108
3.6.20 复位和时钟控制(RCC)子系统
表 91. CLK_SM_0
SM 代码 CLK_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对时钟和复位系统的配置寄存器应用该方法(参见 RCC 寄存器映射)。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 92. CLK_SM_1
SM 代码 CLK_SM_1
说明 时钟安全系统
(CSS)
所有权 ST
具体实现
时钟安全系统(
CSS)检测 HSE 时钟的丢失并执行相应的恢复操作,例如:
• 关闭 HSE
• 通过 HSI 通信
• 相关 NMI 生成
错误报告 NMI
故障检测时间 取决于具体实现(时钟频率值)
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 启动稳定后必须在时钟中断寄存器(
RCC_CIR)上使能 CSS 保护
周期性 连续
诊断测试 CLK_SM_0:配置寄存器的定期回读
多重故障保护 CPU_SM_5:外部看门狗
建议和已知限制 建议仔细阅读关于 NMI 生成的参考手册说明,以便通过应用软件功能正确管理故障情况。
表 93. CLK_SM_2
SM 代码 CLK_SM_2
说明 独立看门狗
所有权 ST
具体实现 独立看门狗 IWDG 能够检测内部主要 MCU 时钟(低频)的故障。
错误报告 复位信号生成
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 66/108
SM 代码 CLK_SM_2
故障检测时间 取决于实现(看门狗超时间隔)
已解决故障模型 永久
取决于 MCU 配置 无
初始化 IWDG 激活。建议在选项字节设置中使用“硬件看门狗”(在复位后自动使能 IWDG)
周期性 连续
诊断测试 不需要
多重故障保护 CPU_SM_1:应用软件中的控制流监控
建议和已知限制 如果使用 IWDG 窗口选项,终端用户必须考虑应用软件执行中可能存在的容差,以避免伪错误报告(影响系统可用性)。
表 94. CLK_SM_3
SM 代码 CLK_SM_3
说明 内部时钟交叉测量
所有权 终端用户
具体实现
使用 TIM14 功能实现该方法,TIM14 功能将由 32 KHz RTC 时钟或外部时钟源(如果有)馈给。将 TIM14 计数器进度与另
一个计数器(通过内部时钟馈给)进行比较。因此,可以检测振荡器频率的异常值。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 无
初始化 取决于实现
周期性 定期
诊断测试 不需要
多重故障保护
CPU_SM_1:应用软件中的控制流监控
CPU_SM_5:外部看门狗
建议和已知限制 处理瞬时故障的效率可忽略不计。在永久时钟相关故障模式覆盖率下,其效率仅为中等水平。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 67/108
3.6.21 独立看门狗(IWDG),系统窗口看门狗(WWDG)
表 95. WDG_SM_0
SM 代码 WDG_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 WDG 或 WDG 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 96. WDG_SM_1
SM 代码 WDG_SM_1
说明 启动时的看门狗软件测试
所有权 终端用户
具体实现
该安全机制确保所使用内部看门狗的正常工作。启动时,软件测试为看门狗设定需要的过期超时,在 SRAM 中保存特定非平
凡代码并等待复位信号。在看门狗复位后,软件获悉看门狗已正确触发,因此不再执行该程序。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 无
初始化 取决于实现
周期性 启动(参见下文)
诊断测试 不需要
多重故障保护
CPU_SM_0:内核定期自检软件
建议和已知限制
在典型的终端用户应用中,只能在启动时以及维护或离线期间执行该测试。这与 IEC61508 中的
“验证测试”概念有关,因此
在操作时间内其诊断覆盖率贡献不能计算在内。
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 68/108

3.6.22 调试
表 97. DBG_SM_0
SM 代码 DBG_SM_0
说明 独立看门狗
所有权 ST
具体实现
硬件随机故障导致的调试意外激活将造成 CPU 操作的巨大干扰,引起独立看门狗或其他系统看门狗 WWGDG 或外部看门狗
的干预。
错误报告 复位信号生成
故障检测时间 取决于实现(看门狗超时间隔)
已解决故障模型 永久
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护 CPU_SM_1:应用软件中的控制流监控
建议和已知限制 无
3.6.23 循环冗余校验模块(CRC)
表 98. CRC_SM_0
SM 代码 CRC_SM_0
说明 CRC 自我覆盖
所有权 ST
具体实现
该模块中实现的 CRC 算法(
CRC-32 以太网多项式:0x4C11DB7)提供出色的消息错误检测功能。因此,通过任何使用模
块重新计算预期签名的操作,都可以容易地检测到影响 CRC 计算的永久和瞬时故障。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 无
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 69/108
3.6.24 系统配置控制器 (SYSCFG)
表 99. SYSCFG_SM_0
SM 代码 SYSCFG_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对系统配置控制器配置寄存器应用该方法。
强烈建议使用该方法保护与硬件诊断激活和错误报告链相关功能有关的寄存器。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 该方法主要与其他 MCU 外设所需的多个其他“配置寄存器回读”存在重叠。记录在这里是出于完整性的考虑。
表 100. DIAG_SM_0
SM 代码 DIAG_SM_0
说明 硬件诊断配置寄存器的定期回读
所有权 终端用户
具体实现
在 STM32G0 Series 中,有多个基于硬件的高效安全机制(例如,闪存上的 ECC)可供使用。应对与诊断措施操作(包括
错误报告)相关的任何配置寄存器应用该方法。因此,终端用户应区别对待与以下内容有关的配置寄存器:
• 硬件诊断使能
• 中断/NMI 使能(如果用于诊断错误管理)
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 70/108
3.6.25 真随机数发生器 (RNG)
表 101. RNG_SM_0
SM 代码 RNG_SM_0
说明 RNG 配置寄存器 RNG_CR 的定期回读
所有权 终端用户
具体实现
必须对 RNG 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 RNG 模块只对特定产品编号可用
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 102. RNG_SM_1
SM 代码 RNG_SM_1
说明 RNG 模块熵在线测试
所有权 ST 和终端用户
具体实现
RNG 模块包含模拟源熵的内部诊断,可用于检测模块本身的故障。此外,可以使用生成的随机数与上一个随机数之间的差
异测试(按照 FIPS PUB 140-2 的要求)。
实现:
• 检查 RNG 错误条件
• 检查生成的随机数与上一个随机数之间的差异
错误报告
RNG 状态寄存器(
RNG_SR)中的 CEIS、SEIS 错误位
导致 FIPS PUB 140-2 测试失败的应用软件错误
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 RNG 模块只对特定产品编号可用
初始化 取决于实现
周期性 连续
诊断测试 N/A
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 -
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 71/108
3.6.26 高级加密标准硬件加速器(AES)
表 103. AES_SM_0
SM 代码 AES_SM_0
说明 AES 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 AES 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 AES 模块只对特定产品编号可用
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 104. AES_SM_1
SM 代码 AES_SM_1
说明 加密/解密辅助检测
所有权 ST
具体实现
AES 模块执行的加密和解密操作由多种数据操作和检查构成,根据所选连接算法,有不同的复杂度级别。大部分影响 AES
模块的硬件随机故障会导致算法违规/错误。从而导致接收器侧的解码错误
错误报告 可能发生多种错误状态,请参见功能文档
故障检测时间 取决于外设配置。
已解决故障模型 永久和瞬时
取决于 MCU 配置 AES 模块只对特定产品编号可用
初始化 取决于实现
周期性 连续
诊断测试 N/A
多重故障保护 AES_SM_2:消息的信息冗余技术
建议和已知限制 -
表 105. AES_SM_2
SM 代码 AES_SM_2
说明 消息的信息冗余技术,包括端到端安全
所有权 终端用户
具体实现
该方法旨在保护外设与其外部
通讯对象之间的通信。在 AES 局部安全理念中,该方法用于处理加密/解密功能检测不到的
故障。
参见 CAN_SM_2 说明获取详细信息。
错误报告 请参考 CAN_SM_2
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 72/108
SM 代码 AES_SM_2
故障检测时间 请参考 CAN_SM_2
已解决故障模型 请参考 CAN_SM_2
取决于 MCU 配置 AES 模块只对特定产品编号可用
初始化 请参考 CAN_SM_2
周期性 请参考 CAN_SM_2
诊断测试 请参考 CAN_SM_2
多重故障保护 请参考 CAN_SM_2
建议和已知限制
重要说明:假定远程
通讯对象具有执行所述检查的同等能
力。参见 CAN_SM_2 获取更多说明
提示 本手册中不分析硬件随机故障的潜在安全功能违规后果。
3.6.27 高清多媒体接口(HDMI) - 消费电子控制(CEC)
表 106. HDMI_SM_0
SM 代码 HDMI_SM_0
说明 配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 HDMI CEC 配置寄存器应用该方法。
关于实现该方法的详细信息,可在 EXTI 控制器中找到。
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 107. HDMI_SM_1
SM 代码 HDMI_SM_1
说明 协议错误信号
所有权 ST
具体实现
USART 通信模块内置协议错误检查(例如,额外校验位检查、上溢和帧错误),用于检测网络相关异常情况。总之,这些
机制能够检测影响模块本身的硬件随机故障的边际百分比。
通常在标准通信软件中处理连接到这些检查器的错误信号,从而减少开销。
错误报告 生成错误标志和可选中断事件
故障检测时间 取决于外设配置(例如,波特率),参见功能文档
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 73/108
SM 代码 HDMI_SM_1
初始化 取决于实现
周期性 连续
诊断测试 不需要
多重故障保护 HDMI_SM_2:消息的信息冗余技术
建议和已知限制 无
表 108. HDMI_SM_2
SM 代码 HDMI_SM_2
说明 消息的信息冗余技术
所有权 终端用户
具体实现
通过使用编码功能为 HDMI 或 CEC 传输的数据包添加冗余检查(例如 CRC 或类似检查)来实现该方法。校验和编码功能必
须足够稳健,以保证数据包中单个位反转的发现概率至少为 90%。
在使用数据之前,必须通过应用软件检查数据包的一致性。
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久和瞬时
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 不需要
多重故障保护
CPU_SM_0:内核
定期自检软件
建议和已知限制
假定 HDMI 或 CEC 通信的另一方具有执行所述检查的同等能力。
不应使用传输完全冗余(消息重复),因为其检测能力仅限于通信单元故障模式的一个子集。
举例来说,对于校验和的编码功能,只使用逐位相加是不合适的。
3.6.28 电压参考缓冲器 (VREFBUF)
表 109. VREF_SM_0
SM 代码 VREF_SM_0
说明 VREFBUF 系统配置寄存器的定期回读
所有权 终端用户
具体实现
必须对 VREFBUF 配置寄存器应用该方法。
关于实现该方法的详细信息,请参见 EXTI 控制器
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护
CPU_SM_0:内核定期自检软件
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 74/108

SM 代码 VREF_SM_0
建议和已知限制 请参考 NVIC_SM_0
表 1
10. VREF_SM_1
SM 代码 VREF_SM_1
说明 通过 ADC 读数进行 VREF 交叉检查
所有权 终端用户
具体实现 此方法基于 ADC 对 VREF 生成信号的采集,从而与预期值进行交叉检查
错误报告 取决于实现
故障检测时间 取决于实现
已解决故障模型 永久
取决于 MCU 配置 无
初始化 取决于实现
周期性 按需
诊断测试 N/A
多重故障保护
CPU_SM_0:
内核定期自检软件
建议和已知限制 可能与 ADC_SM_3 存在重叠
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 75/108
3.6.29 禁用并定期交叉检查未使用外设的意外激活
本节描述针对安全应用未使用的外设或未完全使用的外设的安全机制。
表 111. FFI_SM_0
SM 代码 FFI_SM_0
说明 禁用未使用的外设
所有权 终端用户
具体实现
该方法有助于降低软件应用未使用的外设导致交叉干扰的可能性,以防止硬件故障导致意外激活。
在系统启动后,应用软件必须通过该程序禁用所有未使用的外设:
• 使能 AHB 和 APB 外设复位寄存器上的复位标志
• 禁用 AHB 和 APB 外设时钟使能寄存器上的时钟分配
错误报告 NA
故障检测时间 NA
已解决故障模型 NA
取决于 MCU 配置 无
初始化 NA
周期性 启动
诊断测试 不需要
多重故障保护 FFI_SM_1:干扰避免寄存器的定期回读
建议和已知限制 无
表 112. FFI_SM_1
SM 代码 FFI_SM_1
说明 干扰避免寄存器的定期回读
所有权 终端用户
具体实现
该方法有助于降低外设间发生交叉干扰的可能性,外设可能在相同输入/输出引脚上发生冲突,包括未使用的外设等。必须对
以下寄存器应用该诊断措施:
• 时钟使能和禁用寄存器
• 复用功能编程寄存器
关于实现该方法的详细信息,可在 EXTI 控制器中找到。
错误报告 请参考 NVIC_SM_0
故障检测时间 请参考 NVIC_SM_0
已解决故障模型 请参考 NVIC_SM_0
取决于 MCU 配置 请参考 NVIC_SM_0
初始化 请参考 NVIC_SM_0
周期性 请参考 NVIC_SM_0
诊断测试 请参考 NVIC_SM_0
多重故障保护 请参考 NVIC_SM_0
建议和已知限制 请参考 NVIC_SM_0
UM2455
硬件和软件诊断说明
UM2455 - Rev 1
page 76/108
3.7 使用条件
下表对第 3.6 节:硬件和软件诊断说明中记录的安全理念建议进行了总结。要应用于 STM32G0 Series MCU 的使
用条件以安全机制要求的形式记录。例外情况是为了正确解决特定的故障模式而通过 FMEA 分析引入的一些使用条
件。这些使用条件记录在本节所示表格的末尾。
“等级”栏记录了如何在分析过程中考虑了相关安全机制,符号的含义如下:
• M = 该安全机制总是在正常操作期间工作 – 没有任何终端用户活动能够停用它。
• ++ = 强烈建议作为常规做法且本安全手册中考虑用于计算安全指标,以便在单个 MCU 上达到 SIL2。
• + = 建议作为额外的安全措施,但本安全手册中未考虑用于计算安全指标。 STM32G0 Series 如果它与功能要
求相矛盾或与另一种被标记为“++”的安全机制发生重叠,用户可以跳过该实现。
• o = 可选,不需要或与特定 MCU 配置相关
下表中“永久”和“瞬时”列中的“X”标记表示相关安全机制对此类故障模式有效。
表 113. 安全机制列表
STM32G0 Series xxx 功能 诊断 说明 等级 永久 瞬时
Arm
®
Cortex
®
-M0+ CPU
CPU_SM_0
解决 Arm
®
Cortex
®
-M0+ CPU 核心中永
久故障的定期软件测试
++ X -
CPU_SM_1 应用软件中的控制流监控 ++ X X
CPU_SM_2 应用软件中的双重计算 ++ - X
CPU_SM_3
Arm
®
Cortex
®
-M0+ HardFault 异常
M X X
CPU_SM_4 应用软件的堆栈加固 + X X
CPU_SM_5 外部看门狗 + X X
CPU_SM_6 独立看门狗 ++ X X
CPU_SM_7 MPU - 存储器保护单元 ++ X X
MPU_SM_0 MPU 配置寄存器的定期回读 ++ X X
嵌入式 Flash
FLASH_SM_0 闪存的定期软件测试 + X -
FLASH_SM_1 应用软件中的控制流监控 ++ X X
FLASH_SM_2
Arm
®
Cortex
®
-M0+ HardFault 异常
M X X
FLASH_SM_3 选项字节写保护 M - -
FLASH_SM_4 静态数据封装 + X X
FLASH_SM_5 具有负载验证的选项字节冗余 M X X
FLASH_SM_6 未使用闪存区填充码 + - -
FLASH_SM_7 闪存上的 ECC ++ X X
FLASH_SM_8 读/写/专有代码保护 + - -
FLASH_SM_9 通过软件定期测试闪存地址解码器 ++ X -
内部 SRAM
RAM_SM_0 SRAM 存储器的定期软件测试 ++ X -
RAM_SM_1 奇偶校验位检查 ++ X X
RAM_SM_2 应用软件的堆栈加固 + X X
RAM_SM_3 应用软件中系统变量的信息冗余 ++ X X
RAM_SM_4 应用软件中的控制流监控 o X X
RAM_SM_5 RAM 中应用软件的定期完整性测试 o X X
RAM_SM_6 读保护(RDP),写保护(WRP) + - -
系统架构
BUS_SM_0 互连的定期软件测试 ++ X -
BUS_SM_1 片内数据交换中的信息冗余 ++ X X
UM2455
使用条件
UM2455 - Rev 1
page 77/108
STM32G0 Series xxx 功能 诊断 说明 等级 永久 瞬时
EXTI 控制器
NVIC_SM_0 配置寄存器的定期回读 ++ X X
NVIC_SM_1 通过应用软件执行预期和意外中断检查 ++ X X
DMA/ DMAMUX
DMA_SM_0 配置寄存器的定期回读 ++ X X
DMA_SM_1 通过 DMA 传输的数据包的信息冗余 ++ X X
DMA_SM_2
通过 DMA 传输的数据包的信息冗余,包
括发送者和接收者标识符
++ X X
DMA_SM_3 DMA 的定期软件测试 ++ X -
DMA_SM_4 DMA 事务感知 ++ X X
USART、LPUART1
UART_SM_0 配置寄存器的定期回读 ++ X X
UART_SM_1 协议错误信号 ++ X X
UART_SM_2 消息的信息冗余技术 ++ X X
UART_SM_3 消息的信息冗余技术,包括端到端安全 ++ X X
I2C:
IIC_SM_0 配置寄存器的定期回读 ++ X X
IIC_SM_1 协议错误信号 ++ X X
IIC_SM_2 消息的信息冗余技术 ++ X X
IIC_SM_3 CRC 数据包层面 + X X
IIC_SM_4 消息的信息冗余技术,包括端到端安全 + X X
SPI
SPI_SM_0 配置寄存器的定期回读 ++ X X
SPI_SM_1 协议错误信号 ++ X X
SPI_SM_2 消息的信息冗余技术 ++ X X
SPI_SM_3 CRC 数据包层面 + X X
SPI_SM_4 消息的信息冗余技术,包括端到端安全 + X X
USB Type-C™ / USB Power Delivery 接
口(UCPD)
USB_SM_0 配置寄存器的定期回读 ++ X X
USB_SM_1 协议错误信号 ++ X X
USB_SM_2 消息的信息冗余技术 ++ X X
USB_SM_3 消息的信息冗余技术,包括端到端安全 + X X
ADC
ADC_SM_0 配置寄存器的定期回读 ++ X X
ADC_SM_1 通过应用软件进行多重采集 ++ - X
ADC_SM_2 通过应用软件进行范围检查 ++ X X
ADC_SM_3 ADC 的定期软件测试 ++ X -
ADC_SM_4 ADC 输入的 1oo2 方案 + X X
DAC
DAC_SM_0 配置寄存器的定期回读 ++ X X
DAC_SM_1 ADC 通道上的 DAC 输出环回 ++ X X
COMP
COMP_SM_0 配置寄存器的定期回读 ++ X X
COMP_SM_1 比较器的 1oo2 方案 ++ X X
COMP_SM_2 输入的真实性检查 + X -
COMP_SM_3 通过应用软件进行多重采集 + - X
COMP_SM_4 比较器锁定机制 + - -
基本定时器 TIM 6/7
GTIM_SM_0 配置寄存器的定期回读 ++ X X
GTIM_SM_1 计数定时器的 1oo2 ++ X X
高级、通用和低功耗定时器
TIM1/2/3/14/15/16/17
ATIM_SM_0 配置寄存器的定期回读 ++ X X
UM2455
使用条件
UM2455 - Rev 1
page 78/108
STM32G0 Series xxx 功能 诊断 说明 等级 永久 瞬时
LPTIM1/2
ATIM_SM_1 计数定时器的 1oo2 ++ X X
ATIM_SM_2 输入捕获定时器的 1oo2 ++ X X
ATIM_SM_3 PWM 输出的环回方案 ++ X X
ATIM_SM_4 定时器的锁定位保护 + - -
CRC CRC_SM_0 CRC 自我覆盖 ++ X X
GPIO
GPIO_SM_0 配置寄存器的定期回读 ++ X X
GPIO_SM_1 输入 GPIO 线的 1oo2 ++ X X
GPIO_SM_2 输出 GPIO 线的环回模式 ++ X X
GPIO_SM_3 GPIO 端口配置锁定寄存器 + - -
RTC
RTC_SM_0 配置寄存器的定期回读 ++ X X
RTC_SM_1 运行 RTC 的应用检查 ++ X X
RTC_SM_2
用于检测时间戳或事件捕获中的故障的
应用层面措施
o X X
TAMP TAMP_SM_0 备份寄存器的信息冗余 + X X
电源控制
VSUP_SM_0 配置寄存器的定期回读 ++ X X
VSUP_SM_1 电源电压监测 ++ X -
VSUP_SM_2 独立看门狗 ++ X -
VSUP_SM_3 内部温度传感器检查 o - -
VSUP_SM_4 外设电压监测(PVM) + X -
时钟和复位
CLK_SM_0 配置寄存器的定期回读 ++ X X
CLK_SM_1 CSS 时钟安全系统 ++ X -
CLK_SM_2 独立看门狗 ++ X -
CLK_SM_3 内部时钟交叉测量 + X -
IWDG/WWDG
WDG_SM_0 配置寄存器的定期回读 ++ X X
WDG_SM_1 启动时的看门狗软件测试 o X -
调试 DBG_SM_0 独立看门狗 ++ X X
系统或外设控制
LOCK_SM_0 配置选项的锁定机制 + - -
SYSCFG_SM_0 配置寄存器的定期回读 ++ X X
DIAG_SM_0 硬件诊断配置寄存器的定期回读 ++ X X
RNG
RNG_SM_0
RNG 配置寄存器 RNG_CR 的定期回
读。
++ X X
RNG_SM_1 RNG 模块熵在线测试 ++ X -
AES
AES_SM_0 AES 配置寄存器的定期回读 ++ X X
AES_SM_1 加密/解密辅助检测 ++ X X
AES_SM_2 消息的信息冗余技术,包括端到端安全 ++ X X
HDMI - CEC
HDMI_SM_0 配置寄存器的定期回读 ++ X X
HDMI_SM_1 协议错误信号 + X X
HDMI_SM_2 消息的信息冗余技术 ++ X X
VREFBUF
VREF_SM_0 VREFBUF 系统配置寄存器的定期回读 ++ X X
VREF_SM_1 通过 ADC 读数进行 VREF 交叉检查 + X -
部件隔离(无干扰)
FFI_SM_0 禁用未使用的外设 ++ - -
FFI_SM_1 干扰避免寄存器的定期回读 ++ - -
UM2455
使用条件
UM2455 - Rev 1
page 79/108

STM32G0 Series xxx 功能 诊断 说明 等级 永久 瞬时
Arm
®
Cortex
®
-M0+ CPU
CoU_1
Arm
®
Cortex
®
-M0+ CPU 的复位状态必
须与系统层面的有效安全状态兼容
++ - -
调试 CoU_2
STM32G0 Series 不得在安全功能实现
中使用 xxx 调试功能
++ - -
Arm
®
Cortex
®
-M0+ / 电源系统
CoU_3
不得在安全功能实现中使用低功耗模式
状态
++ - -
STM32G0 Series 外设 CoU_4
终端用户必须为安全功能实现中使用的
每个 STM32 外设实现要求的安全机
制/CoU 组合。
++ X X
Flash 子系统 CoU_5
在闪存区批量擦除和重新编程期间,
STM32G0 Series MCU 不能执行任何安
全功能。
++ - -
CPU 子系统 CoU_7
如果实现多重安全功能,用于保证其相
互独立性的方法必须包含 MPU 的使用。
++ - -
1.
为了在单个
MCU
上达到
SIL2
,将
CPU_SM_5
评级为
“+”
。总之,针对系统层面安全状态的特殊定义,可能
必需将
CPU_SM_5
评级为
“++”
;这种情况下,可以将
CPU_SM_6
评级为
“+”
。更多详细信息,请参见表
7
的
“
建议
”
一行。
2.
如果没有实现多重安全功能,可考虑评级为
“+”
。
3.
如果在
RAM
上执行应用软件,必需考虑评级为
“++”
。
上述安全机制或使用条件根据其性质设计有不同抽象级别:实现的安全机制越是独立于应用,它在各种终端用户应
用上的可能用途越广泛。
安全分析突出了 MCU 中的两个主要部分:
• 系统关键型 MCU 模块。从安全角度来看,每个终端用户应用都会受到这些模块上的故障的影响。由于每个终
端用户应用都使用这些模块,相关方法或安全机制的设计大体上独立于应用。STM32G0 Series 微控制器的系
统关键型模块为:CPU、复位、功耗、时钟、总线矩阵与互联、Flash 与 RAM 存储器(包括其接口)
• 外设模块。此类模块可以不被终端用户应用使用,或者可以用于非安全相关任务。因此,相关安全方法主要在
应用层面作为应用软件解决方案或架构解决方案来实现。
UM2455
使用条件
UM2455 - Rev 1
page 80/108

4 安全结果
本节报告 STM32G0 Series
MCU 安全分析结果。该报告遵循 IEC 61508 和 ST 方法流程,与硬件随机和从属故障
相关。
4.1 随机硬件故障安全结果
本安全手册中报告的 STM32G0 Series 器件随机硬件故障分析按照 ST 的半导体器件安全分析方法流程执行(依据
IEC61508)。通过三个因素保证获得的结果的准确性:
•
ST 方法流程严格符合 IEC61508 的要求和指示
• 关于微控制器设计的详细可靠信息的分析
• 用于安全指标验证的先进故障注入法和工具的使用
因此,STM32G0 Series 安全分析能够探索 MCU 故障模式的完整详尽列表,并对其中的每一种分别采取充分的缓
解措施(安全机制)。相关 FMEA 文档中提供了 STM32G0 Series 故障模式的完整列表。 STM32G0 Series xxx
FMEA 文档可按需提供,请咨询您当地的 ST 销售联系人。
总之,通过采用使用条件中报告的安全机制和使用条件,可以达到下表中总结的完整性等级。
表 114. 整体可达到的安全完整性等级
使用的 MCU 安全架构 目标 安全分析结果
1 1oo1/1oo1D
SIL2 LD 可达到
SIL2 HD/CM
可达到并可能存在性能影响
(1)
2 1oo2
SIL3 LD 可达到
SIL3 HD/CM 可达到并可能存在性能影响
1.
请注意,与上文报告的某些目标达成相关的潜在性能影响主要与基于软件的定期诊断的执行需求有关(参见安全机制说明了
解详情)。因此,影响与系统层面
PST
的
“
积极
”
程度紧密相关(参见假定安全要求)。
本节没有记录得到的相对安全指标(DC 和 SFF)和绝对安全指标(PFH 和 PFD),但 FMEDA 快照中有,原因如
下:
• STM32G0 Series 产品编号的数量很大,
• 声明非安全相关未使用外设的可能性,以及
• 使能或不使能不同的可用安全机制的可能性。
FMEDA 快照是一种静态文档,它报告给定安全机制组合和给定产品编号的以不同细节水平计算的安全指标(在微
控制器层面并针对微控制器基础功能)。如需 FMEDA 计算表,请尽快联系当地的意法半导体销售代表,以获取特
定 MCU 目标产品编号的预期交付日期的相关信息。
提示 安全指标计算仅限于
STM32G0 Series
,因此不包括
WDTe
、
PEv
和
VMONe
(假定安全要求中对它们进行了描
述)。
4.1.1 安全分析结果自定义
为 STM32G0 Series 器件执行的并包含在本安全手册中的安全分析考虑了所有与安全相关的微控制器模块,因此能
够干预安全功能,无一例外。这与通用微控制器分析期间要遵循的保守方法相一致,目的是实现相对于最终应用的
独立性。这意味着按照 IEC61508-4 第 3.6.8 款,没有任何微控制器模块被声明为“安全”,因此 SFF 计算中包含所
有微控制器模块。
在实际的终端用户应用中,并非所有 STM32G0 Series 部件或模块都被用于安全功能的实现。这可能发生在其他两
种可能的情况下:
• 部件根本未被使用(禁用)。
• 部件用于实现非安全相关(例如,驱动电子板上
“上电”LED 指示灯的 GPIO 线)的功能。
要求对这些未使用部件实现相应的安全机制可导致
过犹不及。因此,可以自定义安全分析结果。
终端用户可以将所选的处于以下条件下的 STM32G0 Series 部件定义为“非安全相关”(由终端用户负责):
• 收集这些部件在安全功能实现中不发挥作用的理由和证据。
UM2455
安全结果
UM2455 - Rev 1
page 81/108

• 收集这些部件在正常操作期间因最终系统设计决策导致其不干预安全功能的理由和证据。
• 满足下列缓解 MCU 内部干扰的一般条件(表 115. FFI 的一般要求列表)。
因此,终端用户允许“非安全相关”部件执行以下操作:
• 从 FMEDA 的指标计算中舍弃部件贡献;
• 不实施表 1 中列出的相关安全机制。
就 SFF 计算而言,该程序等同于按照 IEC61508-4 第 3.6.13/14 款(已舍弃模块的任何故障定义)声明“无部件/无
影响”。
4.1.2 免受干扰(FFI)的一般要求
专用分析突出了在发生内部故障时为缓解 STM32G0 Series 内部模块之间的潜在干扰需要遵循的一般要求清单(免
受干扰,FFI)。这些预防措施是 STM32G0 Series 安全理念的组成部分,当终端用户如第 4.1.1 节 安全分析结果
自定义所述将多个微控制器模块声明为“非安全相关”时,这些预防措施可以发挥重要作用。
对终端用户的要求是实现表 115. FFI 的一般要求列表中列出的安全机制(实现详情可以在硬件和软件诊断说明中找
到),不考虑关于它们对安全指标计算所做贡献的任何评估。
表 115. FFI 的一般要求列表
诊断 说明
FFI_SM_0 禁用未使用的外设
FFI_SM_1 干扰避免寄存器的定期回读
BUS_SM_0 互连的定期软件测试
NVIC_SM_0 配置寄存器的定期回读
NVIC_SM_1 通过应用软件执行预期和意外中断检查
DMA_SM_0 配置寄存器的定期回读
DMA_SM_2
通过 DMA 传输的数据包的信息冗余,包括发送者和接收者标识符
(1)
DMA_SM_4
DMA 事务感知
(1)
GPIO_SM_0 配置寄存器的定期回读
1.
仅在实际使用了
DMA
时实现
4.1.3 关于多故障情景的说明
原则上,IEC61508 需要分析多故障情景,因此仅限于一次一种故障是不可接受的。STM32G0 Series 的安全分析
也相应地考虑了多故障情景。此外,根据 ISO26262(集成电路安全分析的参考和先进标准规范)的精神,该分析
调查了会"禁用"规定的安全机制的故障,以便为此类情况提供个性化的缓解措施。 第 3.6 节 硬件和软件诊断说明
表格中的“多故障保护”字段描述了正确管理多故障情景所需的相关安全机制,包括针对安全机制禁用的缓解措施。
强烈建议在安全机制中包括此类缓解措施的实现。对于必须考虑错误累积问题的长期操作系统,这一点尤为重要。
4.2 从属故障分析
微控制器的从属故障分析十分重要。从属故障的主要子类是共因故障(CCF)。其分析按照 IEC 61508:2 附录 E 进
行判定,该附录列出了为允许对具有一个共用半导体衬底的 IC 使用片上冗余要进行验证的设计要求。但是,附录
E.1 和 E.2 适用于 HFT=1,而附录 E.3 必须应用于每个片上冗余,在同一硅晶上实现的诊断也是如此。
由于 STM32G0 Series 器件无片上冗余,因此无需通过 BetaIC 计算法实现 CCF 量化。请注意,对于 1oo2 安全架
构实现,要求终端用户评估参数 βD,即 PFH 计算中使用的两个通道间共因的量度。
STM32G0 Series 器件的架构和结构可能是从属故障的潜在源头。下面几节将对这些情况进行分析。所述安全机制
的详细描述见第第 3.6 节 硬件和软件诊断说明节。
4.2.1 电源
电源是从属故障的潜在源头,因为功率的任何变化都可能影响许多部件,导致非独立故障。以下安全机制可解决和
缓解这些从属故障:
• VSUP_SM_1:电源电压异常值的检测;
UM2455
从属故障分析
UM2455 - Rev 1
page 82/108

• VSUP_SM_2:独立看门狗拥有和 MCU 数字核心的不同电源,这种多样性有助于缓解与主电源变化相关的从
属故障。
因此,强烈建议采用此类安全机制,尽管它们对达到安全完整性等级所需的安全指标贡献不大。参见复位和时钟控
制(RCC)子系统获取详细的安全机制说明。
4.2.2 时钟
系统时钟是从属故障的潜在源头,因为时钟特性(频率、抖动)的变化可能影响许多部件,导致非独立故障。以下
安全机制可解决和缓解这些从属故障:
• CLK_SM_1:时钟安全系统能够检测系统时钟的硬改变(停止)并激活适当的恢复操作。
• CLK_SM_2:独立看门狗具有专用时钟源。系统时钟的频率改变会通过触发应用软件上的例程引起看门狗窗
口违规,导致看门狗执行 MCU 复位。
因此,强烈建议采用此类安全机制,尽管它们对达到安全完整性等级所需的安全指标贡献不大。参见独立看门狗
(IWDG),系统窗口看门狗(WWDG)获取详细的安全机制说明。
4.2.3 DMA
DMA 是主要由所有外设操作的数据传输中一种被广泛共享的资源。DMA 故障可能干扰系统外设或应用软件的行
为,导致非独立故障。解决此类从属故障的安全机制如下:
• DMA_SM_0、
• DMA_SM_1、
• DMA_SM_2。
因此,强烈建议采用此类安全机制。值得注意的是,如果不使用 DMA 进行数据传输,则只需实现 DMA_SM_0。参
见直接存储器访问控制器(DMA/ DMA2D/ DMAMUX)获取详细的安全机制说明。
4.2.4 内部温度
内部温度异常上升是从属故障的潜在源头,因为它可能影响许多 MCU 部件,从而导致非独立故障。用于缓解此潜
在影响的安全机制如下:
• VSUP_SM_3:内部温度读取和检查使用户能够快速检测潜在风险条件,防止其导致一系列内部故障。参见电
源控制获取详细的安全机制说明。
UM2455
从属故障分析
UM2455 - Rev 1
page 83/108

5 证据列表
安全案例数据库保存了为获得本安全手册中报告的结果和结论而执行的安全分析的所有相关信息。
安全案例数据库具体包含以下内容:
• 具有所有安全分析相关文档完整列表的安全案例
• ST 内部
FMEDA 工具数据库用于计算安全指标,包括估计值和实测值
• 安全报告是指详细描述在 STM32G0 Series 器件上按照 IEC 61508 逐条执行的安全分析的文档
• ST 内部故障注入动态数据库包含工具配置和设置、故障注入日志和结果
由于存在 ST 机密信息,上述内容未公开提供,只提供给可能的合格验证机构用于审计和检查。这符合 IEC61508:2
第 7.4.9.7 款注释 2 的说明。
UM2455
证据列表
UM2455 - Rev 1
page 84/108

附录 A 其他安全标准的变更影响分析
本安全手册中描述的安全分析按照 IEC 61508 安全标准执行。本附录报告不同安全标准的变更影响分析的结果。针
对处理的每个新安全标准考虑以下主题:
• 推荐硬件架构(架构类别)的差异以及如何映射到 IEC 61508 的安全架构。
• 安全完整性等级定义和指标计算方法的差异,以及如何按照新标准重新计算和判断 STM32G0 Series 器件的
安全性能。
• 对现在已经达到 IEC 61508 标准的产品,如何进行重新映射和修改(如果需要的话),以使其符合新的标
准。
此变更影响分析中检查的安全标准如下:
• ISO 13849-1:2006 和 ISO 13849-2:2010 – 控制系统的机械和安全相关部件的安全性,
• IEC 62061:2012-11,版本 1.1 –安全相关电气、电子和可编程电子控制系统的机械安全和功能安全,
• IEC 61800-5-2:2007 1.0 版 –调速电气传动系统 – 第 5-2 部分:安全要求 - 功能,
• ISO 26262:2010 – 道路车辆 - 电气或电子(EE)系统。
A.1 ISO 13849-1 / ISO 13849-2
ISO 13849-1 是 B1 类标准。它为包括可编程电子设备、硬件和软件在内的机械控制系统安全相关部件(SRP 或
CS)的开发提供指南。
A.1.1 ISO 13849 架构分类
IOS 13849 的第 6.2 节针对不同的基础参数,系统诊断检测范围(DC),系统平均无危险故障时间(MTTFd)和共
因故障预防(CCF)定义了 5 个类别,反映设计的控制系统(CS)和安全相关部件(SRP)所预期的容错能力和
达到要求的系统安全等级(PLr)。该标准为每个类别推荐了一种满足相关要求的典型架构。
考虑到§6.2 中定义的 ISO 13849 架构类别并以微控制器为中心,表 116 为愿意开发适合安全关键型通道的逻辑运
算器单元并执行指定安全功能的终端用户。
相关假设如下:
1. 通过元件(SRP 或 CS)输入系统、信号处理单元和输出系统的系列组合实现安全功能。
2. 可将 SRP 或 CS 元件分配给一个或多个不同的类别和不同 PL。
3. 安全功能完全处于终端用户应用的范围内。
4. 采用本安全手册中所述安全机制的 STM32G0 Series MCU 作为单个合规项,可达到 PLd 级(相当于 SIL2)
的 CM 应用。
逻辑运算器的 ISO 13849 架构类别如下表所示。
UM2455
其他安全标准的变更影响分析
UM2455 - Rev 1
page 85/108
表 116. ISO 13849 架构分类
仅
限
参考§ 总结 指定逻辑架构 框图
B 6.2.3
主要类别;发生一次故障可导致安全功能丧失。
无需 DC 和 CCF(通常为单通道),MTTFd 为低或中等。
可达到的最高 PL = b
单通道架构,1oo1 中一个 MCU
请参见 第 3 节
合规项的 MTTFd = 高
图 6
1 6.2.4
通过采用以安全关键型应用的“充分试验的组件”为基础的解决方案和“充分试验的”安全
原则来实施 B 类要求。
微控制器未被划分为“充分试验的”组件。
无需 DC 和 CCF(通常为单通道),MTTFd 为高。
可达到的最高 PL = c。
单通道架构,1oo1 中一个 MCU
请参见 第 3 节
合规项的 MTTFd = 高
图 6
2 6.2.5
就类别 1 而言,架构中应包含测试设备,用于执行安全功能检查和报告其失败。总体
DC 为低,必须评估 CCF,MTTFd 的范围从低到高,最高 PL = d。
单通道架构,1oo1d 中一个 MCU
请参见 第 3 节
合规项的 MTTFd = 高
TE 由终端用户负责,PL = d
图 7
3 6.2.6
就 1 类而言,应具有故障检测机制,并且任何单个故障都不会导致安全功能丧失。总
体 DC 为低,必须评估 CCF,MTTFd 的范围从低到高,最高 PL = d
双通道架构,1oo2 中两个相同 MCU
请参见 第 3 节
连续测试或监控
合规项的 MTTFd = 高
图 8
4 6.2.7
就 1 类而言,应具有故障检测机制,并且任何单个故障都不会导致安全功能丧失。总
体 DC 为高,必须评估通道的 CCF,MTTFd 为高,最高 PL = e
双通道架构,1oo2 中两个相同 MCU
请参见 第 3 节
连续测试或监控
合规项的 MTTFd = 高
可达到 PLe
图 8
UM2455
ISO 13849-1 / ISO 13849-2
UM2455 - Rev 1
page 86/108
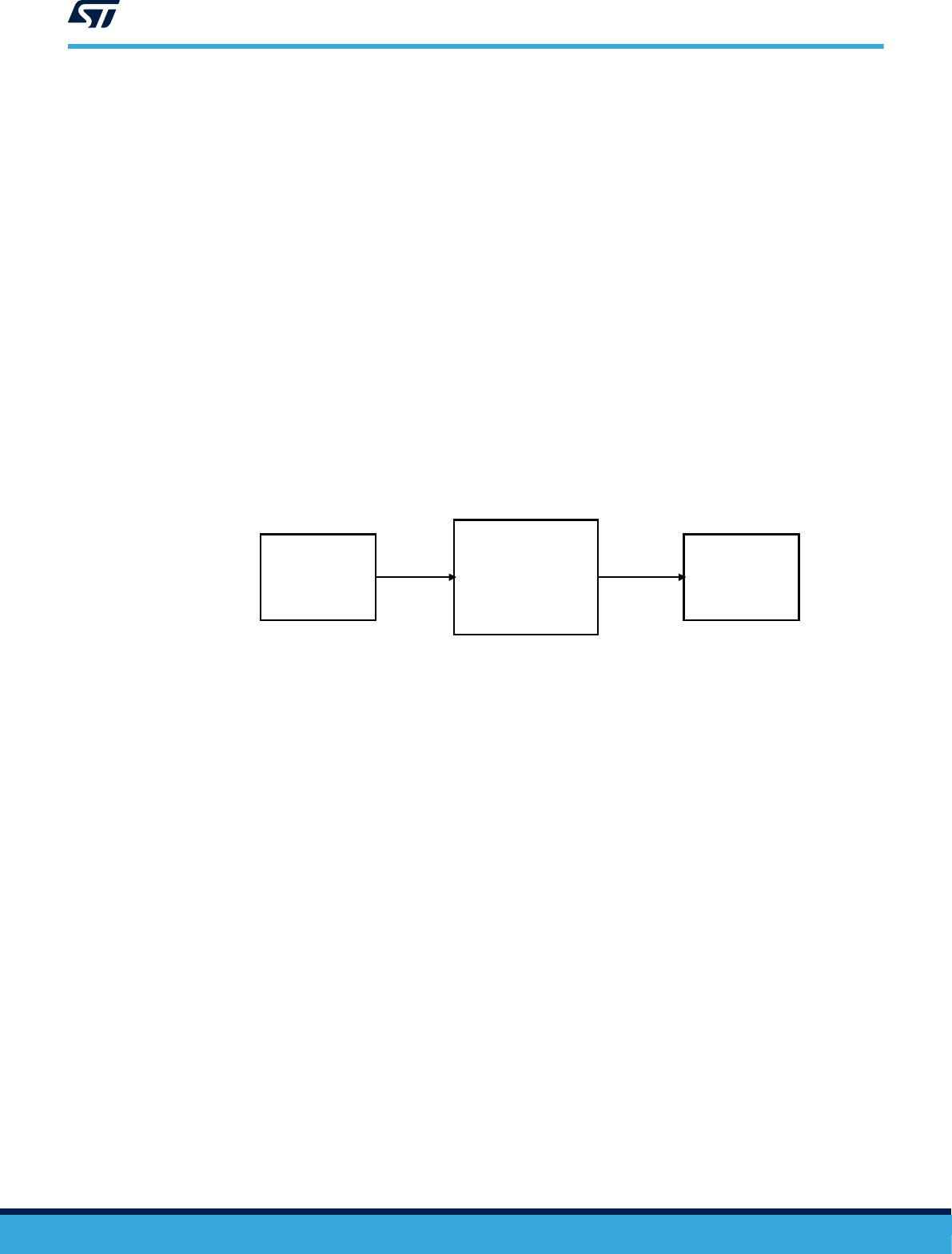
图 6. ISO 13849 类的框图 B 类和 1 类的框图 1
I L O
I
L
O
i
m
i
m
i
m
互联方法
输入设备,如传感器
逻辑
输出设备,如主控制器
UM2455
ISO 13849-1 / ISO 13849-2
UM2455 - Rev 1
page 87/108
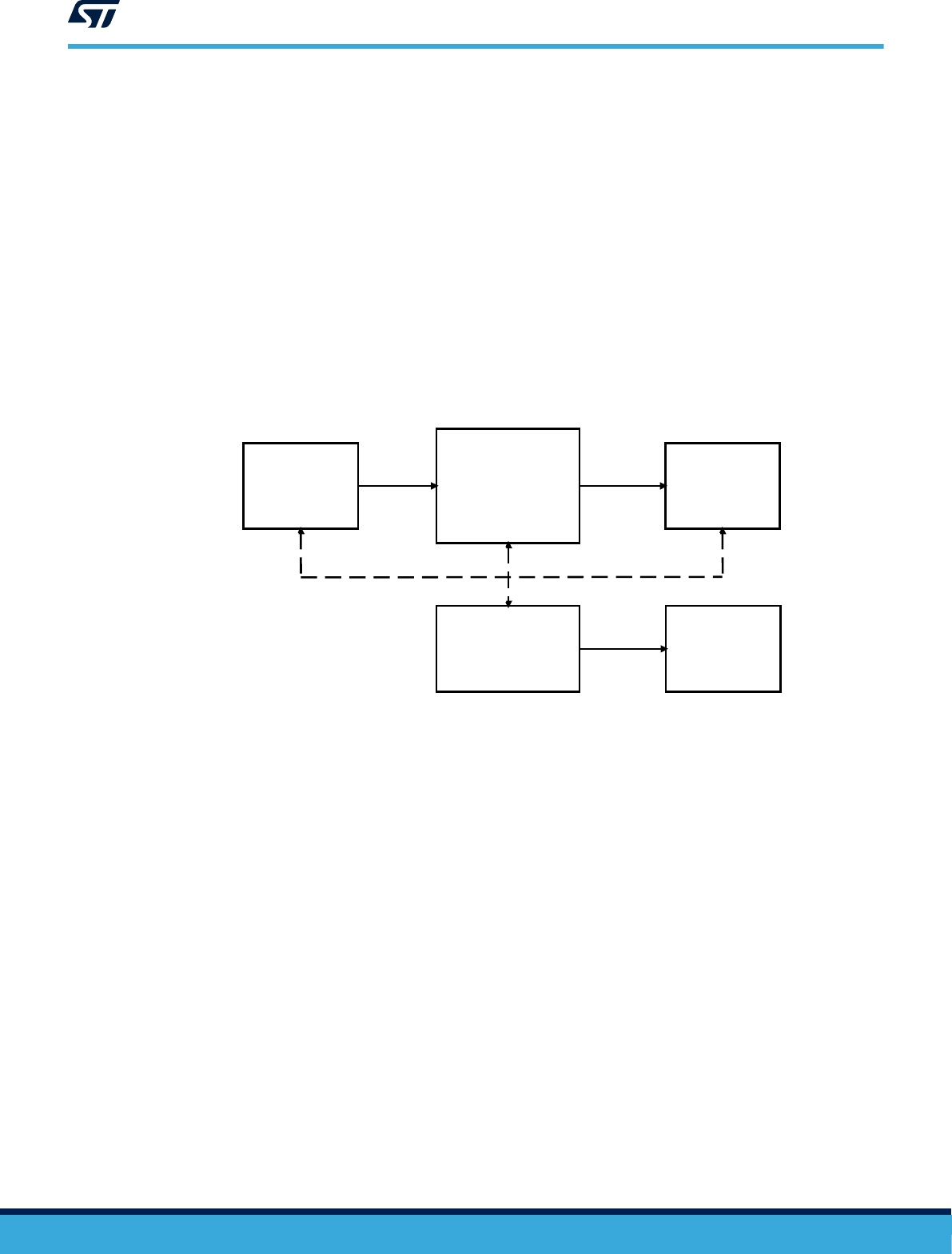
图 7. ISO 13849 类的框图 2
I L O
I
L
O
m
TE
OTE
i
m
i
m
OTETE
i
m
m
i
m
互联方法
输入设备,如传感器
逻辑
输出设备,如主控制器
监控
测试设备
测试设备输出
UM2455
ISO 13849-1 / ISO 13849-2
UM2455 - Rev 1
page 88/108
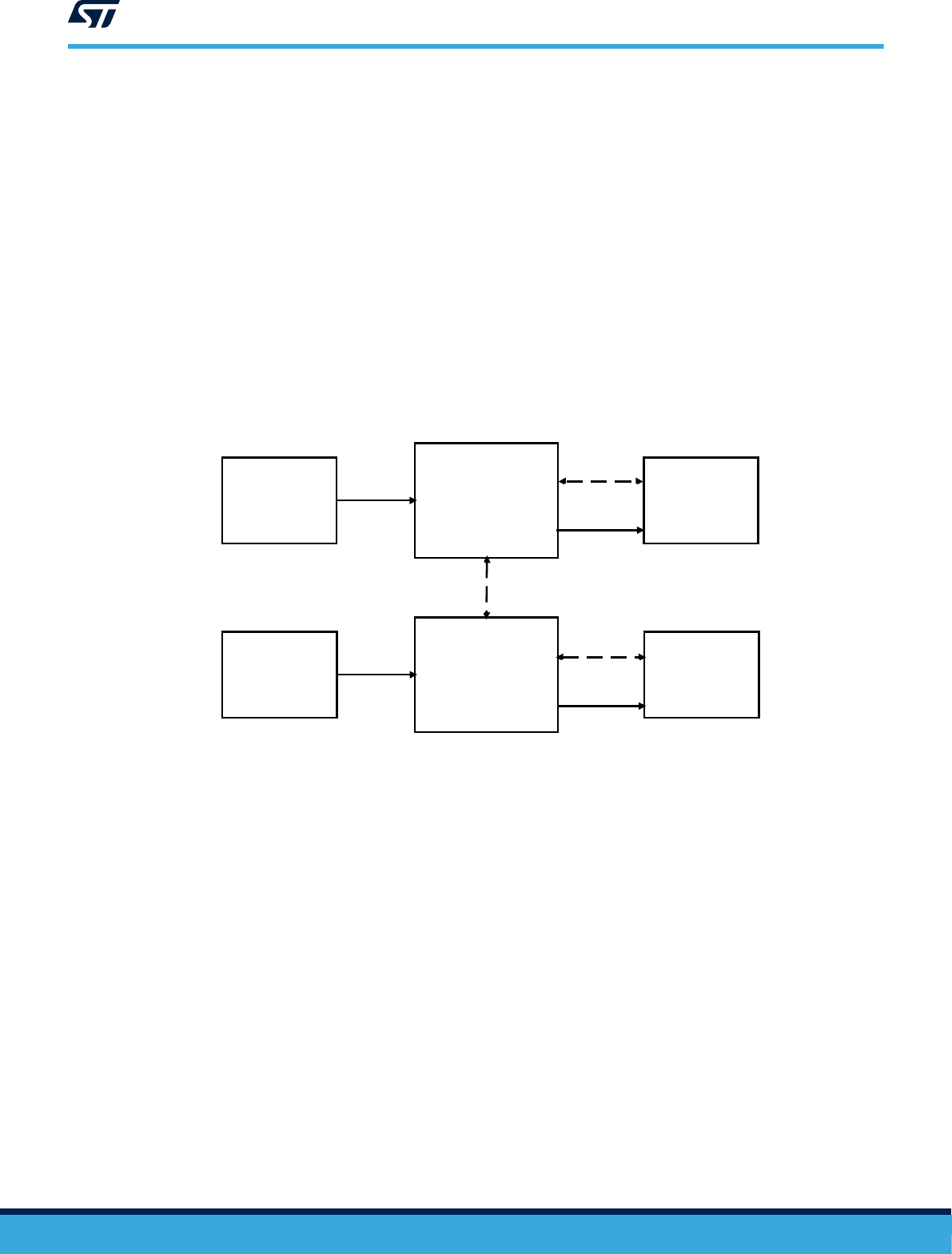
图 8. ISO 13849 类的框图 3 类和 4 类的框图 4
I1
L1
互联方法
c 交叉监控
I1, I2 输入设备,如传感器
L1, L2 逻辑
m 监控
O1, O2 输出设备,如主控制器
i
m
i
m
O2
L2
c
O1
m
i
m
m
I2
i
m
i
m
UM2455
ISO 13849-1 / ISO 13849-2
UM2455 - Rev 1
page 89/108
A.1.2 ISO 13849 安全指标计算
ISO 13849 附录 C 提供了各种电气或电子元件的标准化 MTTFd。但是,在尝试对可编程 IC 的 MTTFd 进行分类的
同时,ISO 13849 中的表 C.3 指向 IC 制造商的数据。因此,可以在 ISO 13849 的范围内重新映射本安全手册的安
全分析结果,因为即使这些结果是基于 IEC 61508 所得出,它们在危险故障识别的定义方面也肯定会越来越准确。
对于 PFH << 1 的某个元件,我们可以假设 MTTFd = 1 / PFH [年]。
从可靠性理论来看,MTTF(λ 和 PFH 的倒数)是只适用于不可修复系统的指标。如今的普遍做法是对不可修复系
统也使用 MTBF,此时必须将 MTBF 理解为设备首次(和唯一)故障的平均时间;这种情况下,MTBF 等于
MTTF。
在 ISO 13849-1 中,每个元件的 DC 具有与 IEC 61508 指标相同的含义;因此,可重复使用本安全手册的结果。但
是,该标准以附录 E 中所定义公式 E.1 的形式定义适用于整个 SRP 或 CS 的 DC
avg
概念,其中,按照通道各子系
统的 MTTF 计算控制系统每部分的贡献权重。在计算 DC
avg
(ISO13849-2 表 D.21 不允许排除)的同时,该标准
否认任何将故障排除在外的可能性,在本安全手册的 STM32G0 Series 分析中采用此相同假设。
必须应用以下公式计算架构中包含 2 个 MCU 的子系统的 DC
avg
:
DC
avg
=
DC
MC
U1
MTTF
MCU1
+
DC
M
CU2
MTTF
MCU2
1
MT
TF
MCU1
+
1
MTTF
MC
U2
提示
A.1.3
对于具有相同 DC 和
MTTF 的两个相同 MCU,DC
avg
= DC。
对于使用两个通道实现的任何架构解决方案,需要评估可能存在的共有故障模式。
ISO 13849
定义了
IEC 61508
方法的简化方法。
ISO 13849 标准的表 7 提供了基于类别、DC
avg
和MTTFd 的 SRP 或 CS 的 PL 评估简化程序。值得注意的是,
本安全手册中分析的每种架构解决方案得到的 PFH 值均可得出较高的 MTTF 值。
ISO 13849 工作成果
下表列出了 ISO 13849 标准要求的工作成果,以及如何将它们映射到 IEC 61508 合规活动的可用工作成果:
表
117. ISO 13849 工作成果列表
ISO 13849-1
STM32G0 Series
IEC 61508 文档
待提供的信息 ISO 13849-1 部分-条款
SRP 或 CS 提供的安全功能
10 技术文档
终端用户责任
每种安全功能的特性
安全相关部件的起始点和结束点
环境条件
性能等级(PL)
选择的一个或多个类别
与可靠性相关的参数(MTTFd、DC、CCF 和任务时间)
10 技术文档
STM32G0 Series 安全手册
和 FMEA
检测系统故障
使用的技术;
考虑的所有安全相关故障
将故障排除在外的理由(参见 ISO 13849-2) 10 技术文档 终端用户责任
设计原理(例如考虑的故障、排除的故障)
10 技术文档
STM32G0 Series 安全手册
防止合理可预见误用的措施
对 ISO 13849 标准该部分的标有日期的引用(即“ISO
13849-1:2006
”);
11 使用信息
类别(B、1、2、3 或 4)
性能等级(a、b、c、d 或 e)
UM2455
ISO 13849-1 / ISO 13849-2
UM2455 - Rev 1
page 90/108
ISO 13849-1
STM32G0 Series
IEC 61508 文档
待提供的信息 ISO 13849-1 部分-条款
断电的使用(参见 ISO 13849-2)
STM32G0 Series 安全手册
G.2 系统故障控制措施
控制电压击穿、电压变化、过压和欠压影响的措施
控制或避免物理环境(例如,温度、湿度、水、振动、粉
尘、腐蚀性物质、电磁干扰及其影响)影响的措施
G.2 系统故障控制措施 终端用户责任
包含软件的 SRP 或 CS 必须实现程序控制流监控,以发现
其中的程序执行错误
控制任何数据通信中发生的错误的影响和其他影响的措施
(参见 IEC 61508-2:2000 第 7.4.8 款)
通过自动测试执行故障检测 G.2 系统故障控制措施 STM32G0 Series 安全手册
能够执行模拟或分析的计算机辅助设计工具 G.3 避免系统故障的措施
终端用户责任
模拟 -
针对机器控制的安全相关说明
应用 J,表 J.1(SW) 终端用户责任
控制架构的定义
软件说明 应用 J,表 J.1(SW)
软件用户指南
(终端用户的责任,因为终端用户负责实现基于软件的
诊断)
功能块建模 应用 J,表 J.1(SW)
软件要求说明
(终端用户的责任,因为终端用户负责实现基于软件的
诊断)
代码中的编码注释
应用 J,表 J.1(SW)
代码检查结果
(终端用户的责任,因为终端用户负责实现基于软件的
诊断)
编码重新读取表
对应关系矩阵 应用 J,表 J.1(SW)
软件模块测试说明
软件系统集成测试说明
可编程电子硬件和软件集成测试说明
(终端用户的责任,因为终端用户负责实现基于软件的
诊断)
测试表 应用 J,表 J.1(SW)
软件模块测试报告
软件系统集成测试报告
可编程电子硬件和软件集成测试报告
软件验证报告
(终端用户的责任,因为终端用户负责实现基于软件的
诊断)
A.2 IEC 62061:2005/AMD1:2012
该标准适用于机械的安全相关电气控制系统(SRECS)的规范、设计和验证或确认。SRECS 是机械的电气或电子
控制系统,其故障可能导致安全性降低或丧失。SRECS 实现安全相关控制功能(SRCF),以防止任何风险增
加。
就安全生命周期而言,该标准的范围限于从安全要求分配到安全确认。
在更宽泛的 IEC 61508:2010 标准的框架内,IEC 62061 是针对机械领域的专用标准。由于只是应用标准,IEC
62061 对技术解决方案的要求不甚严格。此外,它侧重于安全相关控制系统的电气、电子和可编程电子部件。
请注意,IEC 62061 中的§3.2.26 和§3.2.27 仅适用于 HD 或 CM 中的 SRECS,适合机械领域。LD 设备仍然受 IEC
61508 要求的约束。
与 IEC 61508:2010 的密切关系基于以下主要假设:作为子系统或子系统元件的复杂电子元件的设计必须符合 IEC
61508:2010 第 2 部分方法 1H(参见§7.4.4.2)。根据 IEC 62061 标准§3.2.8 中的定义,必须将微控制器作为复杂
元件来考虑。
UM2455
IEC 62061:2005/AMD1:2012
UM2455 - Rev 1
page 91/108

因此,本安全手册中报告的
IEC 61508 范围内的 STM32G0 Series 产品的结果(参见第 4 节 安全结果)也仍然适
用于受 IEC 62061 管制的机械。
终端用户可以高效地采用 STM32G0 Series 合规项,为获得 SIL2 或 SIL3 级(通过采用两个 STM32G0 Series
MCU)机器控制回路设计合适的SRECS。
该标准将“子系统”(参见§3.2.5)定义为其危险故障可导致安全功能丧失的系统架构部件。
考虑到子系统可达到的完整性等级,该标准建议以 HFT 和 SFF 为基础进行分类,如表 118 所示。
表 118. SIL 分类与 HFT
SFF
HFT
0 1 2
<60%
不允许 SIL1 SIL2
60% - <90% SIL1 SIL2 SIL3
90% - <99% SIL2 SIL3 SIL3
≥99% SIL3 SIL3 SIL3
SIL 3 是此背景下对 SRCF 的最高要求。SIL 4 不在范围之内,因为开发的最终结果是一个控制系统只对应一台机
器。
对于设计者而言,必须将表格中列出的 SIL 值视为子系统的 SILCL,其中 SILCL 是可以对 SRECS 子系统要求的最
高 SIL,如 IEC 62061 标准§3.2.24 所定义。
A.2.1 IEC 62061 架构分类
标准的§6.7.8.2 定义了一组基础系统架构,用于设计实现其 SRCF 的 SRECS。“子系统”的定义是重点(参见§
3.2.5),它被定义为其危险故障可导致安全功能丧失的系统架构部件。
这里以微控制器为重点,对 IEC 62061 推荐架构进行了简要总结,以便为终端用户开发可用作子系统(用于 SRCF
实现)的逻辑运算器单元提供支持。
正确理解架构所需的假设如下:
1.
SRCF 完全处于终端用户的范围之内。
2. 采用本安全手册中所述安全机制的 STM32G0 Series 器件作为单个合规项,本身就适合最高 SILCL 2 级的应
用。
3. 如果基础架构需要,为使 HFT ≠ 0,必须使用两个相同的 STM32G0 Series 器件并采用本手册中描述的安全机
制。
4. 对于微控制器,在标准中作为使用寿命或验证测试之间的最小值提及的参数 T1 旨在作为生命周期(任务时
间),假定等于 10 年(根据本手册的假定安全要求)。
表 1
19. IEC 62061 架构分类
仅
限
参考§ 总结 基础逻辑架构
A 6.7.8.2.2
相当于 1oo1,HFT = 0,无诊断功能。
总 PFH
DssA
是 MCU 发生危险故障的概率
单通道架构,1oo1 中 1 个 MCU,n=1
PFH
DSSA
= ʎ
De1
1
Hours
• SILCL = 1,当 SFF < 90%时
•
SILCL = 2,当 90% ≤ SFF < 99%时
• SILCL = 3,当 SFF ≥ 99%时
B 6.7.8.2.3
相当于 1oo2,HFT = 1,单一故障不会导致 SRCF 丧失。
无诊断功能。
双通道架构,具有两个相同 MCU
•
SILCL = 1,当 SFF < 60%时
• SILCL = 2,当 60% ≤ SFF < 90%时
• SILCL = 3,当 SFF ≥ 90%时
在这种情况下:
ʎ
De1
= ʎ
De2
= ʎ
De
UM2455
IEC 62061:2005/AMD1:2012
UM2455 - Rev 1
page 92/108

仅
限
参考§ 总结 基础逻辑架构
ʎ
DSSB
= 1 − β
2
× λ
De
2
× T
1
+ β × λ
De
关于 β 因子,请参见 第 4.2 节
C 6.7.8.2.4
相当于具有诊断功能的 1oo1d,此功能在 SRCF 上发生危险故障时触发
反应功能。
注意:诊断功能提供具有外部子系统诊断(例如,执行器)能力的逻辑
解算器
单通道架构,1oo1 中 1 个 MCU,n=1
诊断功能由终端用户负责
• SILCL = 1,当 SFF < 90%时
• SILCL = 2,当 90% < SFF < 99%时
• SILCL = 3,当 SFF ≥ 99%时
ʎ
DSSC
= ʎ
De1
(1-DC
1
)
从 FMEDA 得出 DC(诊断覆盖率)
PFH
DSSC
= ʎ
DSSC
1
Hours
D 6.7.8.2.5
任何单一故障都不会导致 SRCF 丧失;它相当于 HFT = 1 并具有诊断功
能的 1oo2d。
注意:诊断功能提供具有外部子系统诊断(例如,执行器)能力的逻辑
解算器
双通道架构,具有两个相同 MCU
诊断功能由终端用户负责
• SILCL = 1,当 SFF < 60%时
• SILCL = 2,当 60% ≤ SFF < 90%时
• SILCL = 3,当 SFF ≥ 90%时
关于 β 因子,请参见 第 4.2 节
从 FMEDA 得出 DC(诊断覆盖率)
在这种情况下:
• ʎ
De1
= ʎ
De2
= ʎ
De
• T2 必须由终端用户在逻辑运算器层面进行定义
基于 IEC 62061 §6,图 9 显示了如何通过实现该标准的图 B.1 中描绘的通用控制架构来开发 SRECS,这里显示的
微控制器是采用了使用条件中定义的安全机制的 STM32G0 Series 器件。
UM2455
IEC 62061:2005/AMD1:2012
UM2455 - Rev 1
page 93/108
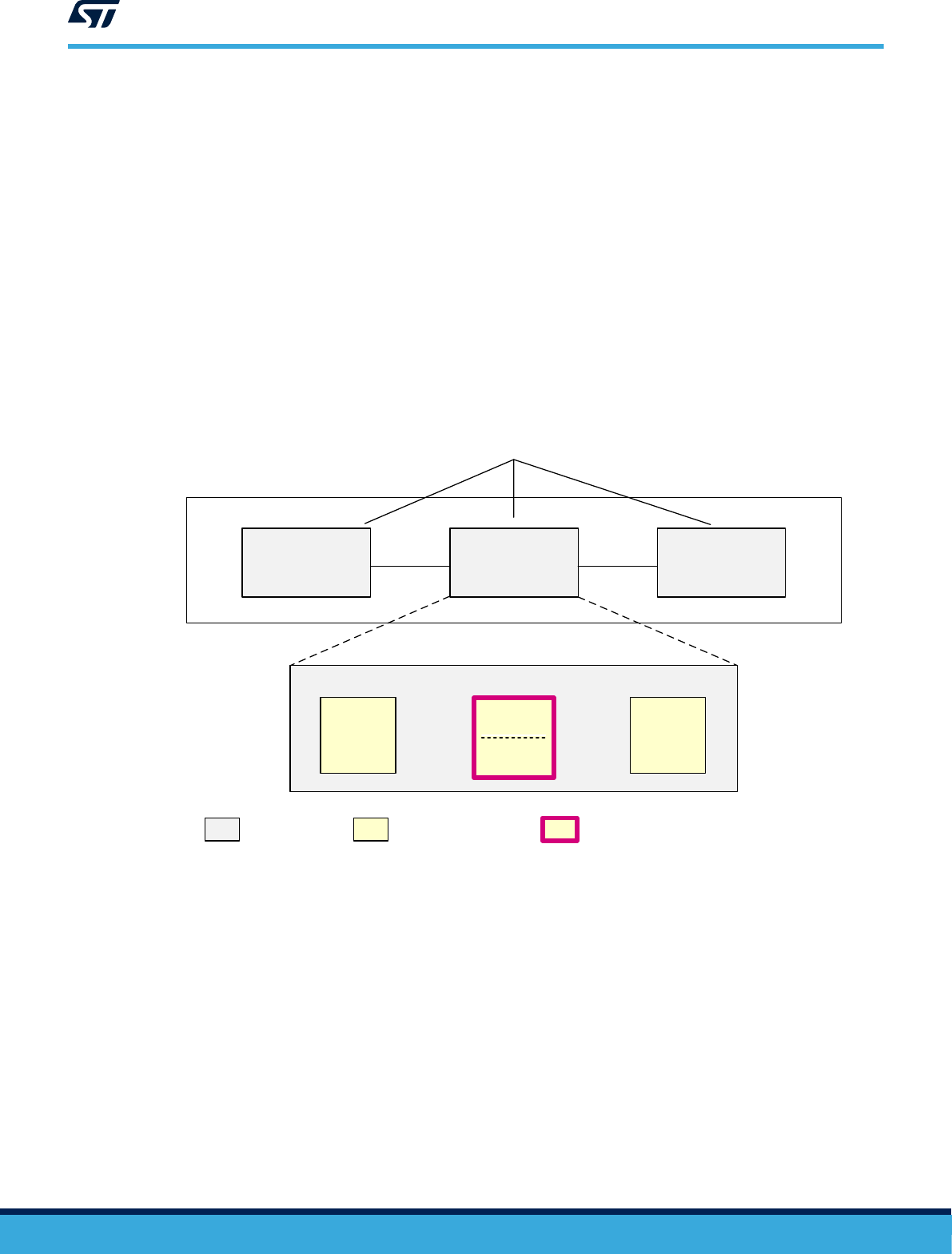
图 9. SRECS 高层图
MS49061V1
逻辑运算器
SRECS
分配的功能和完整性要求
输入 逻辑运算器 输出
PEi PEo
x
具有已实现的诊断的STM32XXX系列
x
子系统元件
x
子系统
PEc
PEd
UM2455
IEC 62061:2005/AMD1:2012
UM2455 - Rev 1
page 94/108
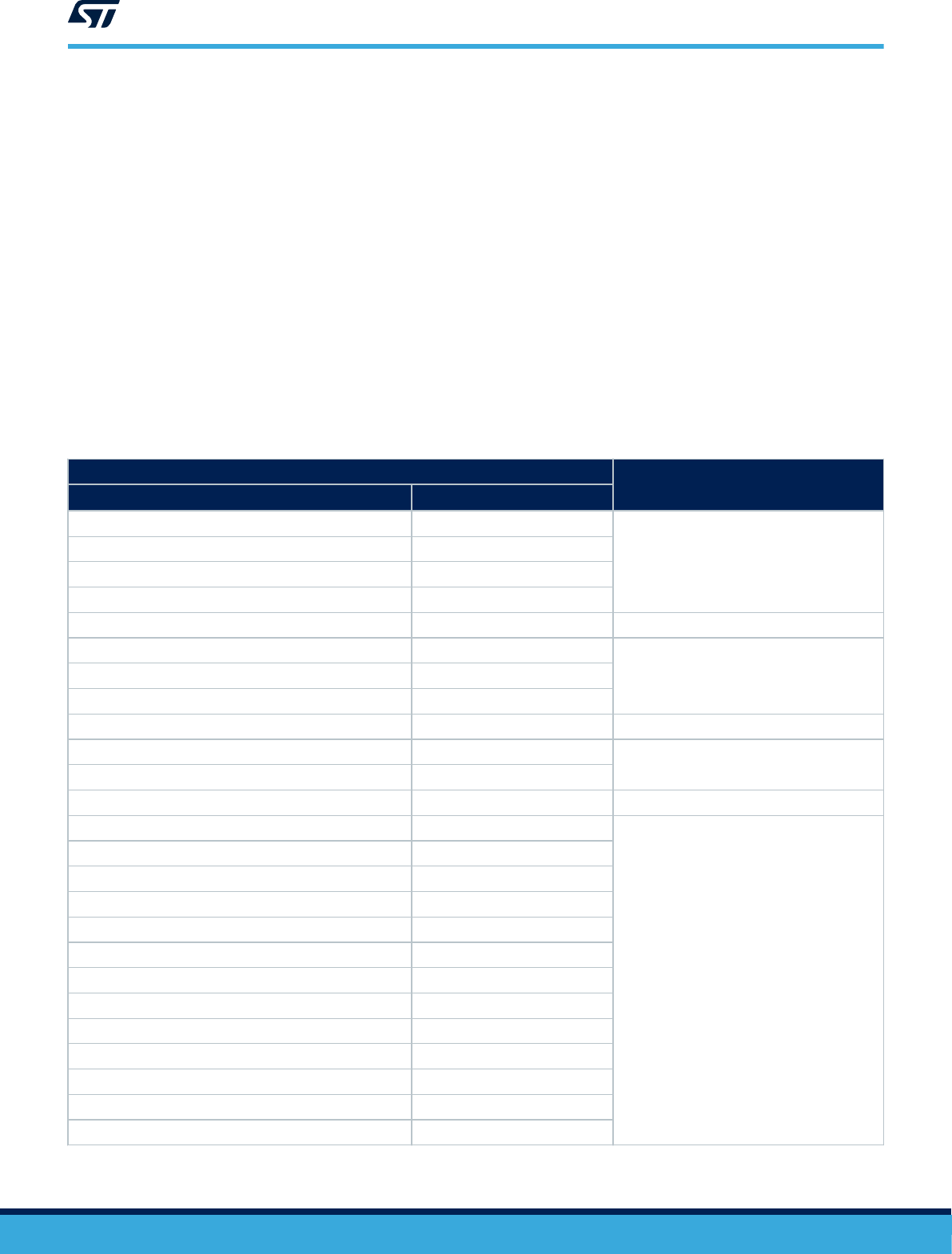
A.2.2 IEC 62061 安全指标计算
T 期间的故障率(λ)是验证测试间隔与子系统寿命之间的较小者。
如 ISO 13849 所示,§6.7.8.2.1 注释 2 中的逼近值仍被视为有效,因此
λ = 1/ MTTF,其中,假设 1> > λ x T。
因此,当 PFH
D
= λ
D
x 1h 时,PFHD = 1 / MTTF。
按照 IEC61508 对 STM32G0 Series 执行的安全分析在危险故障识别的定义(可以在 IEC 62061 的范围内重新映
射)方面越来越准确。因此,FMEDA 中报告的 λ 和 PFH 值(参见第 4 节 安全结果)仍然有效,可以用在上一段
的公式中。
无需重新计算微控制器的 SFF。终端用户使用从本安全手册中得出的相同值。
如前文第 4.2 节 从属故障分析所述,在评估 HFT = 1 的基础架构的 CCF 时,终端用户使用通过 IEC 61508 方法获
得的相同结果(如果有)(参见 IEC 61508:2010-6 附录 D)。或者,终端用户可以应用经过简化的标准方法(参
见附录 F),以便计算要在 PFHD 公式中使用的 β 因子值。
A.2.3 IEC 62061 工作成果
下表列出了 IEC 62061 标准要求的工作成果以及它们与 IEC 61508 合规项工作成果的对应关系:
表 120. IEC 62061 工作成果列表
IEC 62061 1.1 表 8
STM32G0 Series
IEC 61508 文档
待提供的信息 IEC 62061-1.1 条款
功能安全计划 4.2.1
终端用户责任
SRCF 要求说明 5.2
SRCF 的功能安全要求说明 5.2.3
SRCF 的安全完整性要求说明 5.2.4
SRECS 设计 6.2.5 STM32G0 Series 安全手册
结构化设计过程 6.6.1.2
终端用户责任SRECS 设计文档 6.6.1.8
功能块的结构 6.6.2.1.1
SRECS 架构 6.6.2.1.5 STM32G0 Series 安全手册
子系统安全要求说明 6.6.2.1.7
终端用户责任
子系统实现 6.7.2.2
子系统架构(元件及其相互关系) 6.7.4.3.1.2 STM32G0 Series 安全手册
估计容错或 SFF 时声明的故障排除 6.7.6.1c / 6.7.7.3
终端用户责任
软件安全要求规格 6.10.1
基于软件的参数化 6.11.2.4
软件配置管理项 6.11.3.2.2
软件开发工具的适用性 6.11.3.4.1
应用程序文档 6.11.3.4.5
应用软件模块测试结果 6.11.3.7.4
应用软件集成测试结果 6.11.3.8.2
SRECS 集成测试文档 6.12.1.3
SRECS 安装文档 6.13.2.2
安装、使用和维护文档 7.2
SRECS 确认测试文档 8.2.4
SRECS 配置管理文档 9.3.1
UM2455
IEC 62061:2005/AMD1:2012
UM2455 - Rev 1
page 95/108
A.3 IEC 61800-5-2:2007
该标准的范围是调速电气传动系统的功能安全。IEC 61800 第 5.2 部分在 IEC 61508 第一版的框架内,定义了对设
计、开发、集成和验证传动速度应用 PDS(SR)的安全相关部件的要求。更准确地说,IEC 61800 的这一部分将
其应用限制为在 HD 或 CM 中工作的 PSD(RS)(参见§3.10 注释 1),它们实现目标完整性最高为 SIL 3 的安全
功能。
从架构的角度来看,此限制反映在两个表格中,它们是§6.2.2.3 的表 3 和表 4,分别适用于两种不同类型的器件。
CPU 或整个微控制器是复杂电子部件,因此被划分为 B 类。此外,HFT 的概念实际上也来自于 IEC 61508。
A.3.1 IEC 61800 架构分类
从架构的角度来看,IEC 61800 应用反映在两个表格中,它们是§6.2.2.3 的表 3 和表 4,分别适用于两种不同类型
的器件。CPU 或整个微控制器被视为复杂电子部件,因此被划分为 B 类。此外,HFT 的概念实际上也来自于 IEC
61508。因此,架构重新映射到 IEC61508 十分直接。
A.3.2 IEC 61800 安全指标计算
PDS(SR)执行的安全功能的 PFH 由 IEC 61508-2 评估。在 IEC 61800-5-2 中,与 IEC 61508 规范的密切关联还
反映在采用相同的重要指标 PFH(参见§6.2.1)和 SFF(参见§6.2.3)上。因此,可以在 IEC61800 的范围内重新
映射本安全手册(和相关的 FMEA 或 FMEDA)的结果。
A.3.3 IEC 61800 工作成果
下表列出了 IEC 61800-5-2 标准要求的工作成果以及它们与 IEC 61508 合规项工作成果的对应关系。
表 121. IEC 61800 工作成果列表
IEC 618000 5.2
STM32G0 Series
IEC 61508 文档
待提供的信息 IEC 61800-5.2 部分-条款
PDS(SR)的安全要求说明(SRS)包括安全功能要求和安全完整性要求 5.4
终端用户责任
PDS(SR)安全要求说明的验证 8.2
架构层面的硬件设计 6
架构层面的软件设计 IEC 61508-3
功能框图层面的随机硬件故障导致安全功能故障的概率估计 IEC 61508-2 STM32G0 Series 安全手册和 FMEDA
系统设计审核 8.2
终端用户责任
安全相关 PDS(SR)的详细确认规划。 8.3
硬件设计
6
软件设计
可靠性预测 6 STM32G0 Series 安全手册和 FMEDA
系统设计审核
8.2
终端用户责任
模块层面的功能测试
安全相关 PDS(SR)的集成和测试。 6.5
硬件或软件集成测试结果和文档的审核 8.2
开发描述 PDS(SR)安装、调试、操作和维护的用户文档。 7
完整软件和相应文档
8.3
确认测试结果文档
符合确认计划的确认测试和程序
确认测试结果文档
子系统测试计划
6.2.4.1.4
UM2455
IEC 61800-5-2:2007
UM2455 - Rev 1
page 96/108
IEC 618000 5.2
STM32G0 Series
IEC 61508 文档
待提供的信息 IEC 61800-5.2 部分-条款
集成测试计划
6.2.4.1.4
终端用户责任
确认测试计划
配置测试计划
每项测试的详细结果 9.2.g)
预期值与实际值之间的任何不一致 9.2.h)
测试结论:通过或失败原因 9.2.i)
A.4 ISO 26262:2010
该国际标准是汽车领域功能安全的参考标准。它源于 IEC 61508 标准,包括相关修改。
ISO 26262 重新定义了汽车 SIL(ASIL)的安全完整性等级,最低等级为 A,最高等级为 D。下图描述了已按照
TÜV SÜD 进行实证的 SIL 和 ASIL 值之间的相关模型。
UM2455
ISO 26262:2010
UM2455 - Rev 1
page 97/108
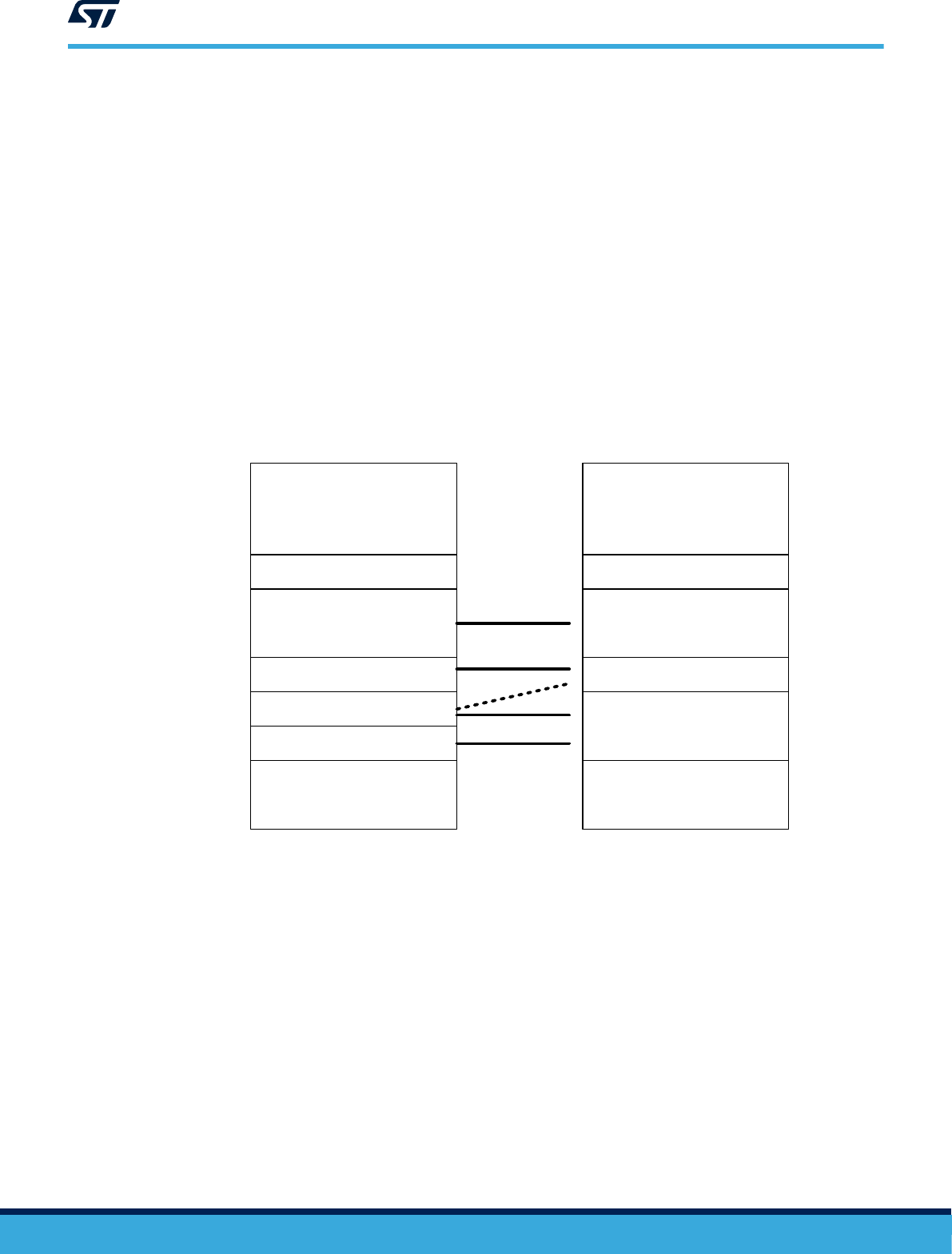
图 10. SIL 和 ASIL 之间的相关模型
1
2
3
4
(QM)
-
-
A
B
C
D
ISO
汽车完整性
等级(ASIL)
IEC(61508)
安全完整性等级
(SIL)
UM2455
ISO 26262:2010
UM2455 - Rev 1
page 98/108
A.4.1 ISO 26262 架构分类
不适用 - 因为 ISO 26262 没有定义任何类别。
A.4.2 ISO 26262 安全指标计算
ISO 26262 标准从稍微有别于 IEC61508 标准的角度定义了硬件指标:
• 单点故障指标(SPFm):使用 IEC61508 中 SFF 的相同公式定义,可能因安全故障的不同定义而有所不同
(参见下文)
• 诊断覆盖率(DC)的定义方式与 IEC61508 的相同;
• 潜在故障指标(LFm):专用 ISO26262 安全指标,用于评估在发生影响诊断部件的故障时设计的稳健性。
IEC61508 标准中无对等指标。
值得注意的是,一些故障在 IEC 61508 标准中被分类为无部件/无影响,而在 ISO26262 标准中被分类为“安全故
障”。因此,IEC61508 标准中的 SFF 计算是“保守的”,可以使用来自 STM32G0 Series FMEDA 的 SPF 值。
对于此类商用现成品(COTS)微控制器(例如,STM32G0 Series),ISO 方案的物性指标是 ASIL B(永久和瞬
时故障的 SPF 指标为 90%,潜在故障为 60%)。由于这些指标与 1oo1 SIL2 方案的相同,可以假定同一组使用条
件或安全机制适用。STM32G0 Series 微控制器的 FMEDA 详细描述了指标计算;请注意,得到的 PMHF 值符合
ASIL B MCU 的期望值。
我们可以得出结论,ASIL B 的目标可通过对最终应用施加一些限制来实现。请注意,安全诊断措施的基础是在每个
FTTI 定期执行软件至少一次。
对于 STM32G0 Series 器件,通过采用保证微控制器适用于 SIL2 应用的相同安全机制组合,可以满足 ASIL B 潜在
故障指标(60%)。
提示 由于
IEC61508
和
ISO26262
在微控制器模块或功能的局部目标解读上存在差异,
SIL2
方案中通过
STM32G0
Series
实现的安全性能与基于
ISO26262-5
第
9.4.3
节的
ISO26262
应用无法兼容(即
“
割集
”
法)。如果您的
ISO26262
安全分析使用此类方法,请仔细检查
STM32G0 Series FMEDA
功能层面的故障率。
A.4.3 ISO 26262 工作成果
下表列出了 ISO 26262 标准要求的工作成果以及它们与 IEC 61508 合规项工作成果的对应关系:
表 122. IEC 26262 工作成果列表
IEC 26262
STM32G0 Series
IEC 61508 文档
待提供的信息 IEC 26262 部分-条款
技术安全要求规格 4-6.5.1
STM32G0 Series 安全手册
技术安全理念 4-7.5.1
从要求得出的安全分析报告 4-7.5.6
硬件安全要求验证报告 5-6.5.3
硬件安全分析报告 5-7.5.2
处理随机硬件故障的项目架构的有效性分析 5-8.5.1
处理随机硬件故障的项目架构的有效性评估审核报告 5-8.5.2
随机硬件故障所致安全目标违规的分析 5-9.5.1
随机硬件故障所致安全目标违规的评估审核报告 5-9.5.3 STM32G0 Series FMEDA
软件安全要求规格 6-6.5.1
终端用户责任
软件架构设计规格 6-7.5.1
软件验证报告(精简) 6-11.5.3
安全分析结果 9-8.5.1 STM32G0 Series 安全手册,FMEA 和 FMEDA
提示
STM32G0 Series
应改写
xxx FMEA
以便将
IEC61508
参考故障模式映射到
ISO26262
参考故障模式中。
UM2455
ISO 26262:2010
UM2455 - Rev 1
page 99/108

版本历史
表 123. 文档版本历史
日期 版本 变更
2018 年 11 月 xx 日 1 初始版本。
UM2455
UM2455 - Rev 1
page 100/108
目录
1 关于本文档 ........................................................................2
1.1 目的和范围 ...................................................................2
1.2 术语和缩略语 .................................................................2
1.3 参考标准 .....................................................................4
2 STM32G0 Series 微控制器开发过程 ..................................................5
2.1 STMicroelectronics 标准开发过程 .................................................5
3 参考安全架构 ......................................................................7
3.1 安全架构简介 .................................................................7
3.2 合规项 .......................................................................7
3.2.1 合规项的定义 ...........................................................7
3.2.2 合规项执行的安全功能 ....................................................9
3.2.3 参考安全架构 - 1oo1 .....................................................9
3.2.4 参考安全架构 - 1oo2 ....................................................11
3.3 假定要求 ....................................................................13
3.3.1 假定安全要求 ..........................................................13
3.4 电气规范和环境限制...........................................................15
3.5 系统安全完整性 ..............................................................15
3.6 硬件和软件诊断说明...........................................................15
3.6.1 Arm
®
Cortex
®
-M0+ CPU..................................................17
3.6.2 嵌入式 FLASH .........................................................22
3.6.3 内部 SRAM ...........................................................27
3.6.4 系统总线架构 ..........................................................31
3.6.5 EXTI 控制器 ...........................................................33
3.6.6 直接存储器访问控制器 (DMA) .............................................35
3.6.7 通用异步收发器(UART) ................................................38
3.6.8 内部集成电路(I2C)1/2 .................................................40
3.6.9 串行外设接口(SPI)1/2 .................................................43
3.6.10 USB - 2.0 通用串行总线接口 FS 模块 ........................................46
3.6.11 模数转换器 (ADC) ......................................................48
3.6.12 数模转换器 (DAC) ......................................................51
UM2455
目录
UM2455 - Rev 1
page 101/108

3.6.13 比较器 (COMP) ........................................................52
3.6.14 基本定时器 TIM 6/7 .....................................................54
3.6.15 高级、通用和低功耗定时器 TIM1/2/3/14/15/16/17 LPTIM1/2 ......................54
3.6.16 通用输入/输出(GPIO)- 端口 A/B/C/D/E/F/G/H/I ..............................58
3.6.17 实时时钟模块(RTC) ...................................................60
3.6.18 入侵和备份寄存器(TAMP) ..............................................62
3.6.19 电源控制..............................................................63
3.6.20 复位和时钟控制(RCC)子系统............................................66
3.6.21 独立看门狗(IWDG),系统窗口看门狗(WWDG) ............................68
3.6.22 调试 .................................................................69
3.6.23 循环冗余校验模块(CRC) ...............................................69
3.6.24 系统配置控制器 (SYSCFG) ...............................................70
3.6.25 真随机数发生器 (RNG)...................................................71
3.6.26 高级加密标准硬件加速器(AES) ..........................................72
3.6.27 高清多媒体接口(HDMI) - 消费电子控制(CEC) .............................73
3.6.28 电压参考缓冲器 (VREFBUF) ..............................................74
3.6.29 禁用并定期交叉检查未使用外设的意外激活 ...................................76
3.7 使用条件 ....................................................................77
4 安全结果..........................................................................81
4.1 随机硬件故障安全结果.........................................................81
4.1.1 安全分析结果自定义 .....................................................81
4.1.2 免受干扰(FFI)的一般要求...............................................82
4.1.3 关于多故障情景的说明 ...................................................82
4.2 从属故障分析 ................................................................82
4.2.1 电源 .................................................................82
4.2.2 时钟 .................................................................83
4.2.3 DMA .................................................................83
4.2.4 内部温度..............................................................83
5 证据列表..........................................................................84
附录 A Change impact analysis for other safety standards...........................85
A.1 ISO 13849-1 / ISO 13849-2 .....................................................85
A.1.1 ISO 13849 架构分类 .....................................................85
UM2455
目录
UM2455 - Rev 1
page 102/108

A.1.2 ISO 13849 安全指标计算..................................................90
A.1.3 ISO 13849 工作成果 .....................................................90
A.2 IEC 62061:2005/AMD1:2012....................................................91
A.2.1 IEC 62061 架构分类 .....................................................92
A.2.2 IEC 62061 安全指标计算..................................................95
A.2.3 IEC 62061 工作成果 .....................................................95
A.3 IEC 61800-5-2:2007 ...........................................................96
A.3.1 IEC 61800 架构分类 .....................................................96
A.3.2 IEC 61800 安全指标计算..................................................96
A.3.3 IEC 61800 工作成果 .....................................................96
A.4 ISO 26262:2010 ..............................................................97
A.4.1 ISO 26262 架构分类 .....................................................99
A.4.2 ISO 26262 安全指标计算..................................................99
A.4.3 ISO 26262 工作成果 .....................................................99
版本历史 ............................................................................. 100
UM2455
目录
UM2455 - Rev 1
page 103/108

表一览
表 1. 术语和缩略语 ......................................................................2
表 2. 本文档内容与 IEC 61508-2 附录 D 要求之间的对应关系 .........................................4
表 3. SS1 和 SS2 安全状态详细信息..........................................................15
表 4. 安全机制字段说明 .................................................................. 16
表 5. CPU_SM_0....................................................................... 17
表 6. CPU_SM_1....................................................................... 17
表 7. CPU_SM_2....................................................................... 18
表 8. CPU_SM_3....................................................................... 18
表 9. CPU_SM_4....................................................................... 18
表 10. CPU_SM_5....................................................................... 19
表 11. CPU_SM_6....................................................................... 19
表 12. CPU_SM_7....................................................................... 20
表 13. MPU_SM_0 ......................................................................20
表 14. FLASH_SM_0 ..................................................................... 22
表 15. FLASH_SM_1 ..................................................................... 22
表 16. FLASH_SM_2 ..................................................................... 23
表 17. FLASH_SM_3 ..................................................................... 23
表 18. FLASH_SM_4 ..................................................................... 23
表 19. FLASH_SM_5 ..................................................................... 24
表 20. FLASH_SM_6 ..................................................................... 24
表 21. FLASH_SM_7 ..................................................................... 25
表 22. FLASH_SM_8 ..................................................................... 25
表 23. FLASH_SM_9 ..................................................................... 26
表 24. RAM_SM_0 ......................................................................27
表 25. RAM_SM_1 ......................................................................27
表 26. RAM_SM_2 ......................................................................27
表 27. RAM_SM_3 ......................................................................28
表 28. RAM_SM_4 ......................................................................28
表 29. RAM_SM_5 ......................................................................29
表 30. RAM_SM_6 ......................................................................29
表 31. BUS_SM_0.......................................................................31
表 32. BUS_SM_1.......................................................................31
表 33. LOCK_SM_0...................................................................... 31
表 34. NVIC_SM_0 ...................................................................... 33
表 35. NVIC_SM_1 ...................................................................... 33
表 36. DMA_SM_0 ......................................................................35
表 37. DMA_SM_1 ......................................................................35
表 38. DMA_SM_2 ......................................................................35
表 39. DMA_SM_3 ......................................................................36
表 40. DMA_SM_4 ......................................................................36
表 41. UART_SM_0...................................................................... 38
表 42. UART_SM_1...................................................................... 38
表 43. UART_SM_2...................................................................... 38
表 44. UART_SM_3...................................................................... 39
表 45. IIC_SM_0 ........................................................................40
表 46. IIC_SM_1 ........................................................................40
表 47. IIC_SM_2 ........................................................................40
表 48. IIC_SM_3 ........................................................................41
表 49. IIC_SM_4 ........................................................................41
表 50. SPI_SM_0 ....................................................................... 43
表 51. SPI_SM_1 ....................................................................... 43
表 52. SPI_SM_2 ....................................................................... 43
UM2455
表一览
UM2455 - Rev 1
page 104/108

表 53. SPI_SM_3 ....................................................................... 44
表 54. SPI_SM_4 ....................................................................... 44
表 55. USB_SM_0.......................................................................46
表 56. USB_SM_1.......................................................................46
表 57. USB_SM_2.......................................................................46
表 58. USB_SM_3.......................................................................47
表 59. ADC_SM_0....................................................................... 48
表 60. ADC_SM_1....................................................................... 48
表 61. ADC_SM_2....................................................................... 48
表 62. ADC_SM_3....................................................................... 49
表 63. ADC_SM_4....................................................................... 49
表 64. DAC_SM_0....................................................................... 51
表 65. DAC_SM_1....................................................................... 51
表 66. COMP_SM_0 .....................................................................52
表 67. COMP_SM_1 .....................................................................52
表 68. COMP_SM_2 .....................................................................52
表 69. COMP_SM_3 .....................................................................53
表 70. COMP_SM_4 .....................................................................53
表 71. GTIM_SM_0 ...................................................................... 54
表 72. GTIM_SM_1 ...................................................................... 54
表 73. ATIM_SM_0 ......................................................................55
表 74. ATIM_SM_1 ......................................................................55
表 75. ATIM_SM_2 ......................................................................55
表 76. ATIM_SM_3 ......................................................................56
表 77. ATIM_SM_4 ......................................................................56
表 78. GPIO_SM_0 ...................................................................... 58
表 79. GPIO_SM_1 ...................................................................... 58
表 80. GPIO_SM_2 ...................................................................... 58
表 81. GPIO_SM_3 ...................................................................... 59
表 82. RTC_SM_0 .......................................................................60
表 83. RTC_SM_1 .......................................................................60
表 84. RTC_SM_2 .......................................................................60
表 85. TAMP_SM_0...................................................................... 62
表 86. VSUP_SM_0......................................................................63
表 87. VSUP_SM_1......................................................................63
表 88. VSUP_SM_2...................................................................... 63
表 89. VSUP_SM_3......................................................................64
表 90. VSUP_SM_4......................................................................64
表 91. CLK_SM_0 ....................................................................... 66
表 92. CLK_SM_1 ....................................................................... 66
表 93. CLK_SM_2 ....................................................................... 66
表 94. CLK_SM_3 ....................................................................... 67
表 95. WDG_SM_0 ......................................................................68
表 96. WDG_SM_1 ......................................................................68
表 97. DBG_SM_0.......................................................................69
表 98. CRC_SM_0....................................................................... 69
表 99. SYSCFG_SM_0 ...................................................................70
表 100. DIAG_SM_0 ...................................................................... 70
表 101. RNG_SM_0 ......................................................................71
表 102. RNG_SM_1 ......................................................................71
表 103. AES_SM_0 ....................................................................... 72
表 104. AES_SM_1 ....................................................................... 72
表 105. AES_SM_2 ....................................................................... 72
表 106. HDMI_SM_0 ......................................................................73
UM2455
表一览
UM2455 - Rev 1
page 105/108

表 107. HDMI_SM_1 ......................................................................73
表 108. HDMI_SM_2 ...................................................................... 74
表 109. VREF_SM_0 ...................................................................... 74
表 110. VREF_SM_1 ...................................................................... 75
表 111. FFI_SM_0........................................................................ 76
表 112. FFI_SM_1........................................................................76
表 113. 安全机制列表 .....................................................................77
表 114. 整体可达到的安全完整性等级 .......................................................... 81
表 115. FFI 的一般要求列表 ................................................................. 82
表 116. ISO 13849 架构分类................................................................. 86
表 117. ISO 13849 工作成果列表 ............................................................. 90
表 118. SIL 分类与 HFT .................................................................... 92
表 119. IEC 62061 架构分类 .................................................................92
表 120. IEC 62061 工作成果列表.............................................................. 95
表 121. IEC 61800 工作成果列表.............................................................. 96
表 122. IEC 26262 工作成果列表.............................................................. 99
表 123. 文档版本历史 .................................................................... 100
UM2455
表一览
UM2455 - Rev 1
page 106/108

图一览
图 1. STMicroelectronics 产品开发过程 .......................................................6
图 2. 合规项的定义 .....................................................................8
图 3. 1oo1 参考架构 ................................................................... 10
图 4. 1oo2 参考架构 ................................................................... 12
图 5. STM32 PST 的分配和目标 ........................................................... 14
图 6. ISO 13849 类的框图 B 类和 1 类的框图 1 ................................................. 87
图 7. ISO 13849 类的框图 2 ..............................................................88
图 8. ISO 13849 类的框图 3 类和 4 类的框图 4 ................................................. 89
图 9. SRECS 高层图 ...................................................................94
图 10. SIL 和 ASIL 之间的相关模型 .......................................................... 98
UM2455
图一览
UM2455 - Rev 1
page 107/108

重要通知 - 请仔细阅读
意法半导体公司及其子公司(“ST”)保留随时对 ST 产品和/或本文档进行变更、更正、增强、修改和改进的权利,恕不另行通知。买方在订货之前应获取关于
ST 产品的最新信息。ST 产品的销售依照订单确认时的相关 ST 销售条款。
买方自行负责对 ST 产品的选择和使用,ST 概不承担与应用协助或买方产品设计相关的任何责任。
ST 不对任何知识产权进行任何明示或默示的授权或许可。
转售的 ST 产品如有不同于此处提供的信息的规定,将导致 ST 针对该产品授予的任何保证失效。
ST 和 ST 徽标是 ST 的商标。所有其他产品或服务名称均为其各自所有者的财产。
本文档中的信息取代本文档所有早期版本中提供的信息。
© 2018 STMicroelectronics - 保留所有权利
UM2455
UM2455 - Rev 1
page 108/108
