步进电机基础知识讲解
1.步进电机的简介
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以
通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
2.步进电机的发展史
| 发展历程 | 国家 | 大事件 |
|---|---|---|
| 原理的提出 |  |
法国人佛罗曼提出了将电磁铁的吸引力转化为旋转力矩的方法。当时,激磁相的切换用机械式凸轮的接触点来完成,这就是步进电机的原型。 |
| 实际应用 |  |
1920年步进电机的实际应用才开始,称为VR(Variable Relutance,变磁阻)型步进电机,被英国海军用作定位控制和远程遥控。 |
| 混合式步进电机的诞生 |  |
大约在1952年,由美国GE公司的Karl Feiertag开发的发电机演变而来。与现在的两相HB型步进电机结构相同,取得了US专利。 |
3.步进电机的特点

步进电机相对普通电机来说,他可以实现开环控制,即通过驱动器信号输入端输入的脉冲数量和频率实现步进电机的角度和速度控制,无需反馈信号。但是步进电机不适合使用在长时间同方向运转的情况,容易烧坏产品,即使用时通常都是短距离频繁动作较佳。
相对伺服电机来说,伺服电机内部通过安装旋转编码器实现了反馈控制,伺服电机可以达到的转矩要高于步进电机,但是价格相对也高,所以在转矩能满足的情况下,推荐用步进电机。步进电机配合驱动器使用,很多驱动器都支持细分功能,即实现很小的步进角,控制更精确。
4.步进电机的主要分类
步进电机在构造上有三种主要类型:反应式(Variable Reluctance,VR)、永磁式(Permanent Magnet,PM)和混合式(Hybrid Stepping,HS)。
| 名称 | 样式 | 简介 |
|---|---|---|
| 反应式步进电机 |  |
定子上有绕组、转子由软磁材料组成。结构简单、成本低、步距角小,可达1.2°、但动态性能差、效率低、发热大,可靠性难保证。 |
| 永磁式步进电机 |  |
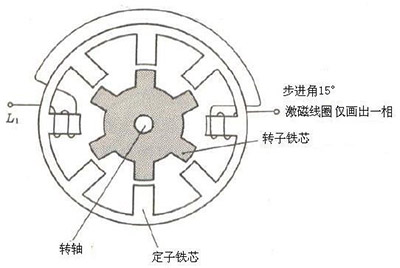
永磁式步进电机的转子用永磁材料制成,转子的极数与定子的极数相同。其特点是动态性能好、输出力矩大,但这种电机精度差,步矩角大(一般为7.5°或15°)。 |
| 混合式步进电机 |  |
混合式步进电机综合了反应式和永磁式的优点,其定子上有多相绕组、转子上采用永磁材料,转子和定子上均有多个小齿以提高步矩精度。其特点是输出力矩大、动态性能好,步距角小,但结构复杂、成本相对较高。 |
按定子上绕组来分,共有二相、三相和五相等系列。最受欢迎的是两相混合式步进电机,约占97%以上的市场份额,其原因是性价比高,配上细分驱动器后效果良好。该种电机的基本步距角为1.8°/步,配上半步驱动器后,步距角减少为0.9°,配上细分驱动器后其步距角可细分达256倍(0.007°/微步)。由于摩擦力和制造精度等原因,实际控制精度略低。同一步进电机可配不同细分的驱动器以改变精度和效果。
5.步进电机的主要结构
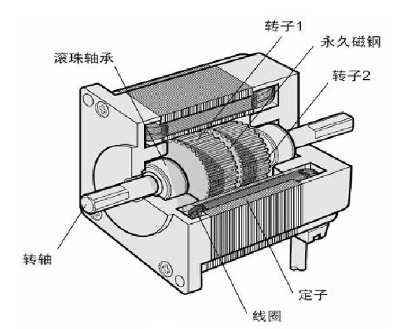
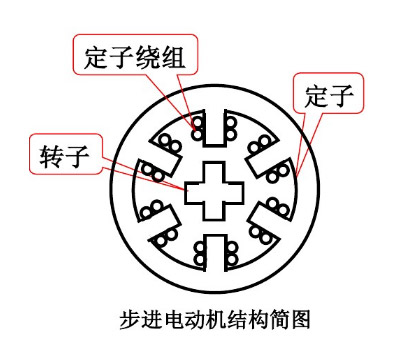
定子、转子是用硅钢片或其他软磁材料制成的。定子的每对极上都绕有一对绕组,构成一相绕组,共三相称为A、B、C三相。
在定子磁极和转子上都开有齿分度相同的小齿,采用适当的齿数配合,当A相磁极的小齿与转子小齿一一对应时,B相磁极的小齿与转子小齿相互错开1/3齿距,C相则错开2/3齿距。
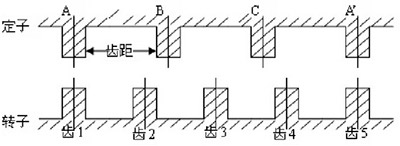
A相绕组与齿1、5一一对应,而此时B相绕组与齿2错开1/3齿距,而与齿3错开2/3齿距,C相绕组与齿3错开2/3齿距,而与齿4错开1/3齿距。
电机的位置和速度由绕组通电次数(脉冲数)和频率成一一对应关系。而方向由绕组通电的顺序决定。
6.步进电机的选型
电机的步距角取决于负载精度的要求,将负载的最小分辨率(当量)换算到电机轴上,每个当量电机应走多少角度(包括减速)。电机的步距角应等于或小于此角度。
步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸)
进电机一般在较大范围内调速使用、其功率是变化的,一般只用力矩来衡量,力矩与功率换算如下:
P= Ω・M Ω=2π・n/60 P=2πnM/60
P= Ω・M Ω=2π・n/60 P=2πnM/60
7.步进电机与伺服电机的区别

步进电机

伺服电机
·控制精度不同
步进电机的动态力矩一下子很难确定,我们往往先确定电机的静力矩。静力矩选择的依据是电机工作的负载,而负载可分为惯性负载和摩擦负载二种。一般情况下,静力矩应为摩擦负载的2-3倍内好,静力矩一旦选定,电机的机座及长度便能确定下来(几何尺寸)
·低频特性不同
步进电机的输出力矩随转速升高而下降,且在较高转速时会急剧下降,所以其最高工作转速一般在300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
·矩频特性不同
步进电机的输出力矩随转速升高而下降,且在较高转速时会急剧下降,所以其最高工作转速一般在300~600RPM。交流伺服电机为恒力矩输出,即在其额定转速(一般为2000RPM或3000RPM)以内,都能输出额定转矩,在额定转速以上为恒功率输出。
·过载能力不同
步进电机一般不具有过载能力。交流伺服电机具有较强的过载能力。
·运行性能不同
步进电机的控制为开环控制,启动频率过高或负载过大易出现丢步或堵转的现象。交流伺服驱动系统为闭环控制,驱动器可直接对电机编码器反馈信号进行采样一般不会出现步进电机的丢步或过冲的现象,控制性能更为可靠。
·速度响应性能不同
步进电机从静止加速到工作转速(一般为每分钟几百转)需要200~400毫秒。交流伺服系统的加速性能更好,可用于要求快速启停的控制场合。
步进电机的工作原理知识讲解
当电流流过定子绕组时,定子绕组产生一矢量磁场。该磁场会带动转子旋转一角度,使得转子的一对磁场方向与定子的磁场方向一致。当定子的矢量磁场旋转一个角度。转子也随着该磁场转一个角度。每输入一个电脉冲,电动机转动一个角度前进一步。它输出的角位移与输入的脉冲数成正比、转速与脉冲频率成正比。改变绕组通电的顺序,电机就会反转。所以可用控制脉冲数量、频率及电动机各相绕组的通电顺序来控制步进电机的转动。
相关原理介绍:
- 深度剖析步进电机
- 步进电机原理及维护
- 步进电机的核步法闭环控制原理
- 步进电机步距角的正余弦细分原理
- 4相步进电机工作原理
- 感应子式步进电机工作原理
- 单片机控制步进电机的原理
- 混合式步进电机工作原理及其PLC控制
- 新型汽车仪表机心步进电机原理及控制
- 新型永磁式单相单拍运行步进电机原理分析
- 一种机电式单相步进电机的原理分析
- 永磁谐波式单相步进电机原理与力矩计算
- l297_l298组合驱动步进电机原理图
- 三相混合式多细分步进电机驱动器简介
- 步进电机细分控制
- 混合式直线步进电机技术详解
- 老x详解步进电机――连载一:啥是步进电机
- 老x详解步进电机――连载二:常见的步进电机有哪些
- 步进电动机驱动系统的基本知识
- 论述基于MCU和DSP的步进电机控制技术
- 步进电机原理及使用说明
步进电机相关设计总结
- 用字位显示接口驱动步进电机的设计方法
- 基于CPLD的步进电机驱动模块设计
- 基于SoPC的步进电机设计
- 基于专用控制芯片的步进电机运动控制系统设计
- 步进电机跟踪伺服系统的设计
- 基于步进电机细分驱动的太阳能自动跟踪系统的设计
- 基于THB6064H的步进电机闭环控制电路设计
- 一种红外遥控式步进电机控制器的设计与实现
- 基于步进电机驱动器MC33991的车速表设计
- 基于Nios II步进电机控制器IP核的设计与实现
- 基于PLC的步进电机控制系统设计
- 超声成像系统步进电机驱动电路的设计
- 基于单片机控制的步进电机调速系统的设计
- 五相步进电机全数字恒流驱动系统设计
- 基于Proteus与单片机的步进电机控制设计
- 步进电机数字控制系统设计
- 步进电机超高分辨率细分控制函数发生器的设计与实现
- 基于AT89C52单片机的步进电机控制系统设计
- 高精度高寿命直线步进电机设计
- 一种利用51单片机控制的步进电机设计
步进电机的应用案例盘点
- 步进电机的运动控制系统及其应用
- 步进电机驱动控制技术及其应用设计研究
- 步进电机细分驱动在喷膜机中的应用
- 步进电机在包装机械中的应用
- 步进电机在高精度位置控制系统中的应用
- 步进电机在航空发动机数控系统中的应用
- 步进电机在汽车制动元件测试系统中的应用
- 步进电机在自动线中的应用
- 单片机连接ULN2003驱动步进电机的应用
- 二相步进电机驱动芯片TA8435H及其应用
- 基于ARM的步进电机控制在太阳自动跟踪系统中的应用
- 几种步进电机加减速方法的对比研究及其应用
- 数控机床中步进电机的应用
- 双步进电机控制系统在航空相机中的应用
- 微型计算机接口技术在步进电机控制中的应用
- 无线传感器网络在步进电机运行状态监测中的应用
- FPGA在步进电机控制中的应用
- 步进电机变频技术的应用
- L295在四相步进电机驱动中的应用
- 分享的双极步进电机的加减速的应用
- 用于办公应用设备的高能效步进电机方案